引言
803-step源代码服务于艺术项目游感803Step,于2023年6月初在浙江展览馆展出,Verimake主要负责艺术想法的可视化及交互。
本篇文章中的源代码包括:
- 如何通过雷达芯片实现与一定范围内行人交互
- 可用鼠标交互程序demo(可供参考)
1. 软件和硬件的准备
1.1 硬件准备
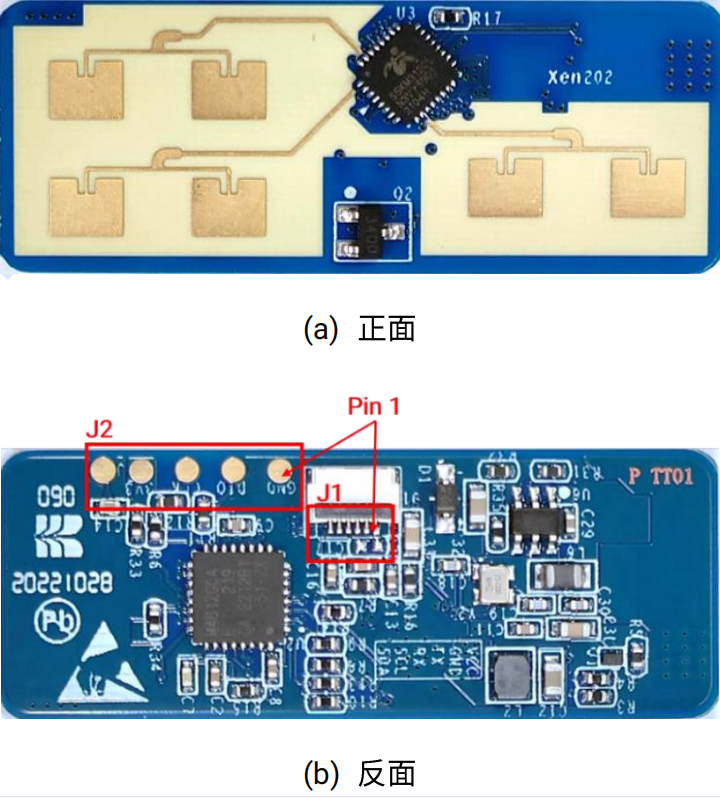
除了用来跑python程序的一台电脑,如果想实现与人行动的交互,需要准备一片雷达芯片,并且放置在想要布置区域的最前方。我们使用的是矽典微的毫米波传感器SoC。
1.2 软件准备
1.2.1 安装anaconda和配置python
803-step源代码的运行环境是python3.9。我们可以通过安装anaconda配置python环境,本站也给出了完整流程的教程Anaconda安装以及“Hello world!"程序。
结束安装教程的流程后,我们可以在终端中确认python的安装以及版本。打开电脑的终端 或Terminal 。
- 在MacOS中我们可以进入启动台,搜索“终端”;
- 在Windows系统中我们可以点击开始,搜索“Anaconda Prompt”。
本篇教程以MacOS为例。在终端中输入python。如果出现以下界面则已经完成python环境的安装。
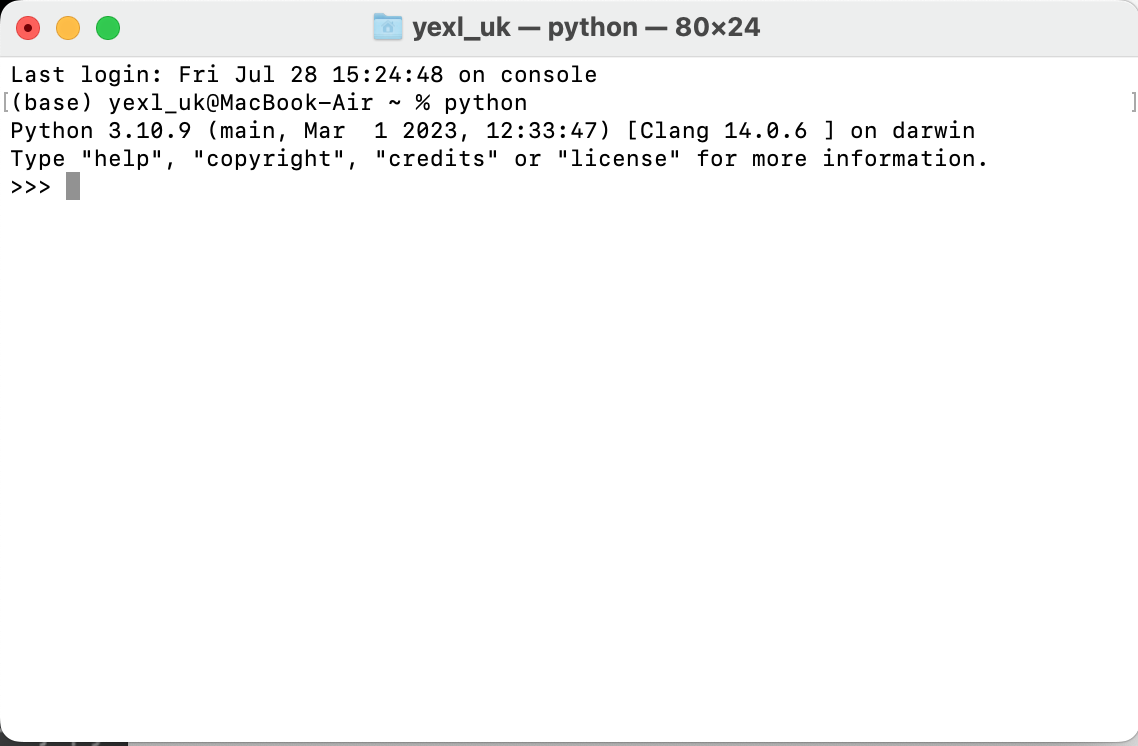
从上图可以看到Python 3.10.9是本机的python版本,比我们需要的3.9版本新。所以可以通过配置虚拟环境来得到我们需要的版本。
1.2.2 配置虚拟环境
我们先创建一个python 3.9版本的虚拟环境来专门运行step-803的代码。如果还停留在上一步的终端界面,先输入exit() 回到命令行中。
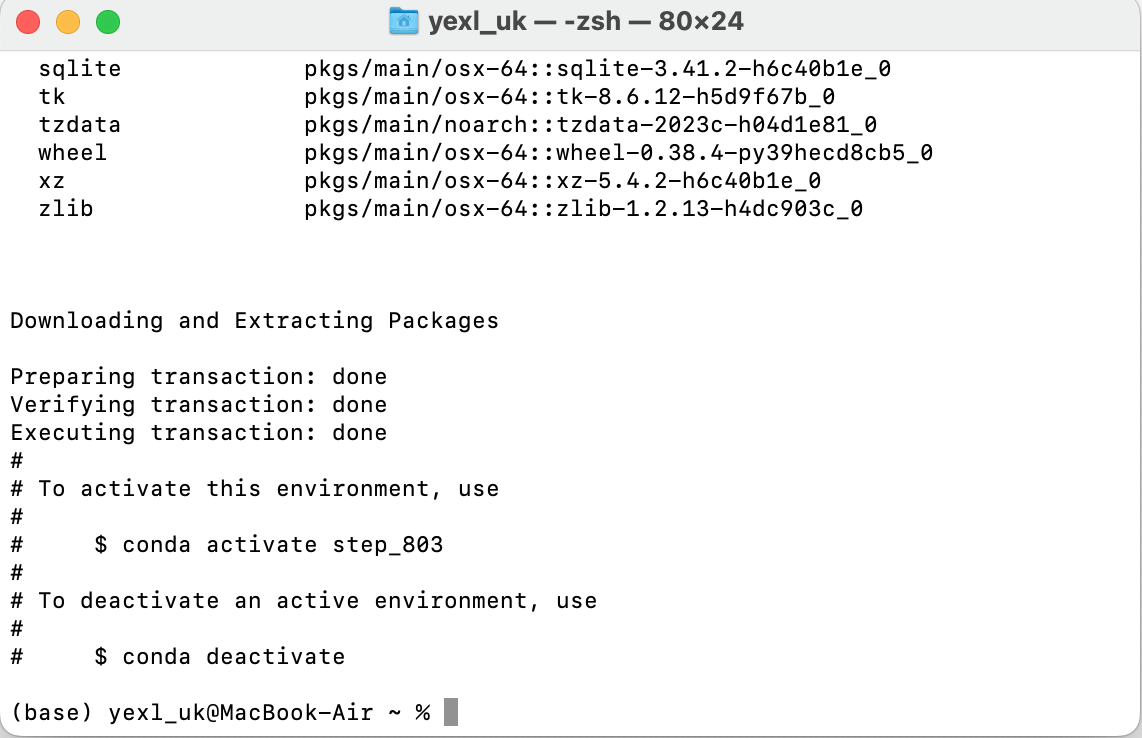
输入conda create -n step_803 python=3.9 -y 创建名叫step_803 的环境。终端中会跳出一些信息,当出现如下界面的时说明创建完成。
1.2.3 安装运行需要的包
通过输入conda activate step_803 来激活虚拟环境,进入到我们刚新建的环境803_step中;输入conda deactivate 返回最初的环境。如果左边括号里的base变成虚拟环境的名称则表示激活成功。
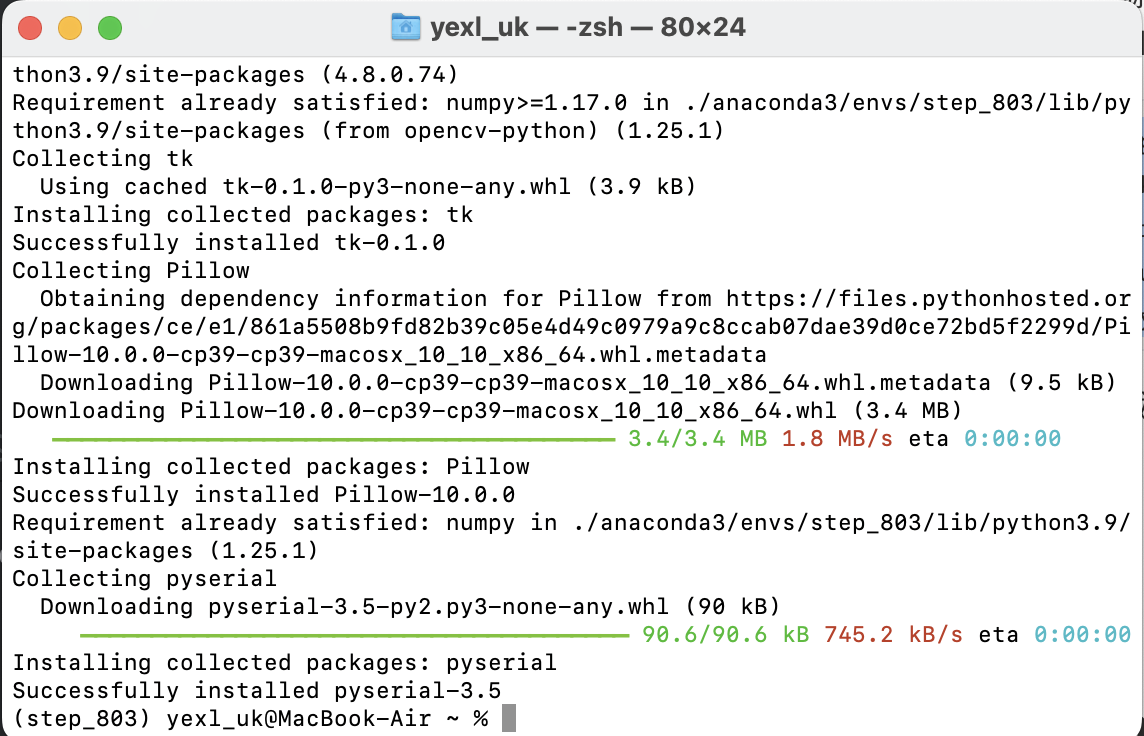
运行803-step的源代码需要额外安装这几个包:opencv;tkinter;pillow;numpy和pyserial。在命令行中输入如下代码:
pip install opencv-python
pip install tk
pip install Pillow
pip install numpy
pip install pyserial
运行结束后,我们的事前准备就完成了。
2. 在terminal中运行可视化程序
2.1 下载源代码并进入803_steps目录
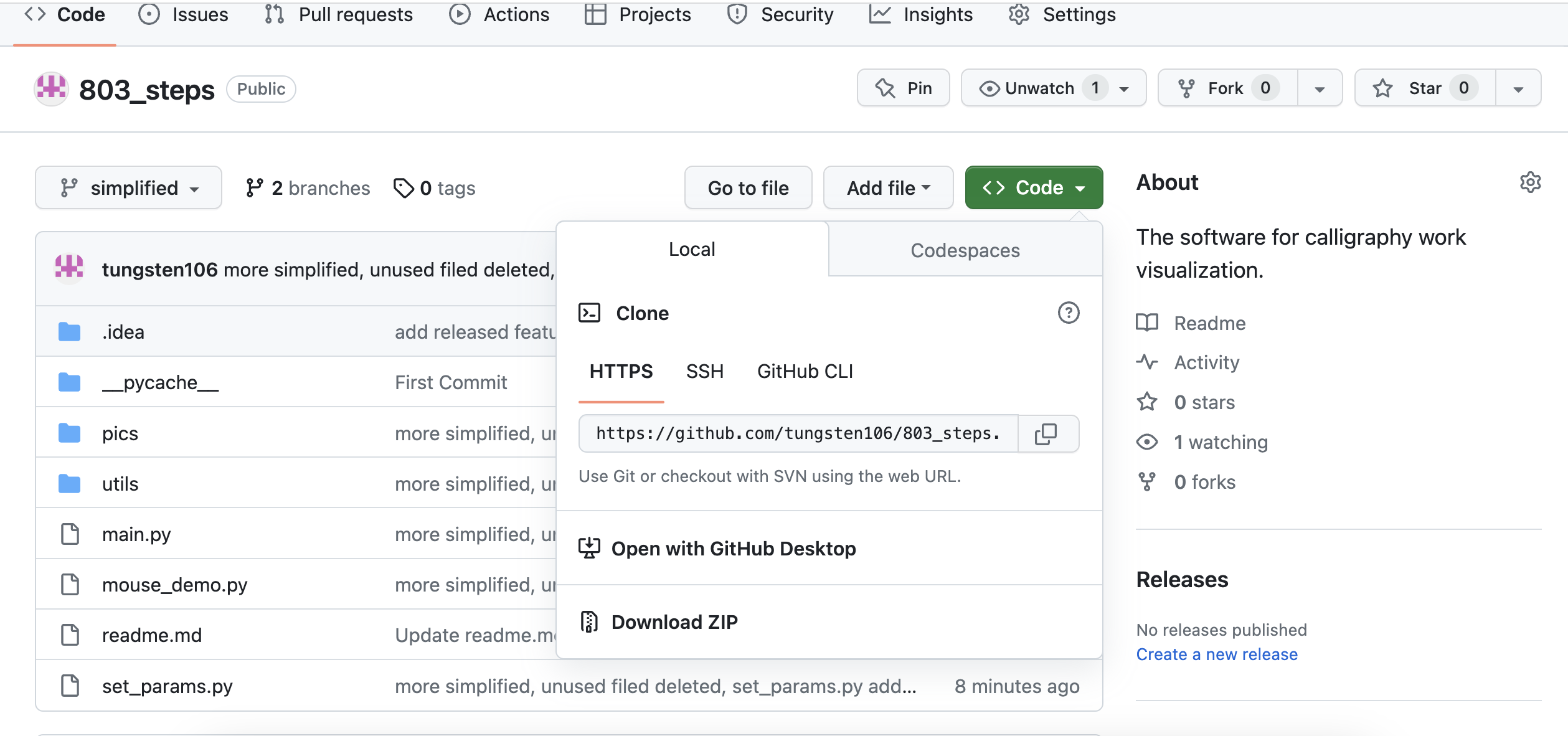
在GitHub上下载我们的源代码。点击803_steps链接,其中有两种方法可供下载。
2.1.1 通过git clone
在打开的终端中,输入指令直接通过git下载
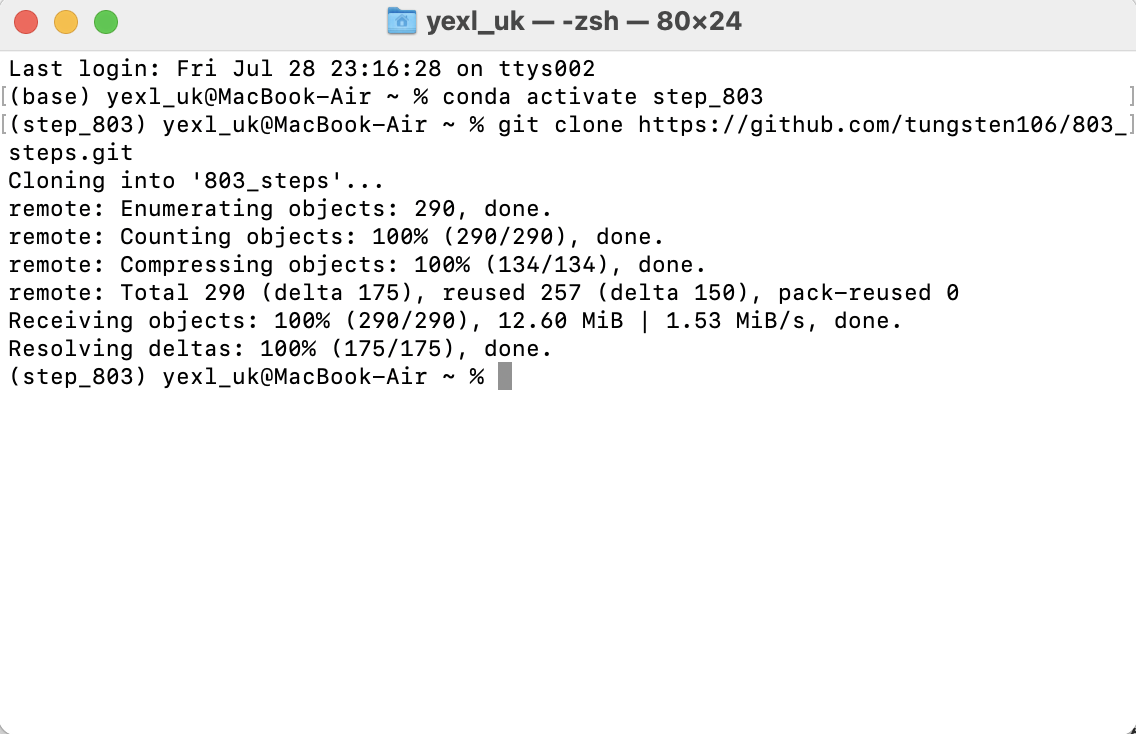
git clone https://github.com/tungsten106/803_steps/tree/simplified
在终端中继续输入:cd 803_steps 进入源代码文件夹。
2.1.2 直接下载ZIP文件
点击GitHub页面上的绿色Code按钮。然后选择Download ZIP。
解压后选择在解压后的文件夹中打开终端。
2.2 执行程序
不管是哪一种方法,我们都需要返回新建的虚拟环境803_step。
2.2.1 无硬件demo版(鼠标交互版)
我们首先介绍如何使用demo版。在终端中输入python mouse_demo.py;
第一次加载可能要稍等一会,根据电脑配置反应速度也会不一样。等一个黑色的5*9方格的窗口出现后,就可以和它交互了。

2.2.2 正式版(需要硬件雷达)
如果是正式版,需要先连接雷达。我们将雷达通过USB串口接入电脑。
同样我们在终端中执行程序。在终端中输入python main.py ,程序会自动检测电脑接入的USB端口设备,例如:

程序会需要指定一个设备作为雷达的输入。在光标处输入串口对应的USB设备ID,比如如果是第一个就输入0,第二个就输入1。
如果输入正确就会跳出如2.2.1一样的5*9方格窗口,如果输入的不是数字程序就会自动中止。此时只需要再执行一次python main.py 就可以再次启动程序。
3. 调整参数
803_step程序中可以调整的参数有两个,分别是程序窗口的大小(画布大小)及雷达感应范围的四个顶点坐标。参数调整主要是通过set_params.py 这个文件。它的内容如下:
# 设置画布大小
canvas_width, canvas_height = 1086, 600
# 四个角的坐标,需要人工校对
# 顺序是屏幕的左上-右上-右下-左下,依次校对。
input_points = np.float32([[1136,1147], # 左上
[-1227,1250], # 右上
[-1345,2400], # 右下
[1300,2430]]) # 左下
3.1 画布大小
画布大小指的是5*9程序窗口的大小。默认设定是1086*600,你可以根据自己电脑的分辨率和需求进行更改。
如果需要将画布变得更大,并保持原始尺寸,以下是一些参考方案。如果想更改,只需要把第二行更改成如下任何一行,或者以(长,宽)的形式填入自己希望的数字。
canvas_width, canvas_height = 1920, 1080
canvas_width, canvas_height = 2048, 1280
但需要注意的是,改得越大(超过2048)有可能会产生卡顿。
3.2 (正式版)校对雷达感应范围
游感803Step的主要交互是基于一块方形地毯,而行人站在上面的位置对应了demo中鼠标的位置。而雷达芯片是将位置坐标传递给程序的重要部件。为了获取尽量精准的对应坐标,需要对窗口的各个顶点在现实中的对应位置进行校对。
步骤很简单。当我们成功运行2.2.2中的程序以后,程序会不断打印出雷达捕捉到的人物坐标,格式为一行两个数字。站在相对应5*9窗口左上角的位置半分钟,直到得到一个相对稳定的输出。按照左上-右上-右下-左下的顺序,依次进行校对。
随后将得到的坐标依次填入set_params.py 中含有input_points 的变量中,如下:
input_points = np.float32([[1136,1147], # 左上
[-1227,1250], # 右上
[-1345,2400], # 右下
[1300,2430]]) # 左下
 网站备案号:ICP备16046599号-1
网站备案号:ICP备16046599号-1