智能追踪补光灯——毫米波雷达的简单应用
前言

新的CH549进阶项目来啦!这次带来的教程项目名是智能追踪补光灯,如上图所示,这次使用到了新的硬件:毫米波雷达;这次将用CH549简单驱动毫米波雷达实现对人脸的追踪捕捉补光。和往常一样,此次依然作为51的进阶练习,基础薄弱的可以看verimake的51相关教程《以 CH549 为例的 51 教程》。这次的项目里面将用到42步进电机,步进电机驱动器A4988,带传动减速器,毫米波雷达,OLED屏。
部件简介
42步进电机

本次项目中的驱动电机,通过接下来要介绍的步进电机驱动器驱动,本身精度较好,可以完成本次项目要求。
步进电机驱动器A4988
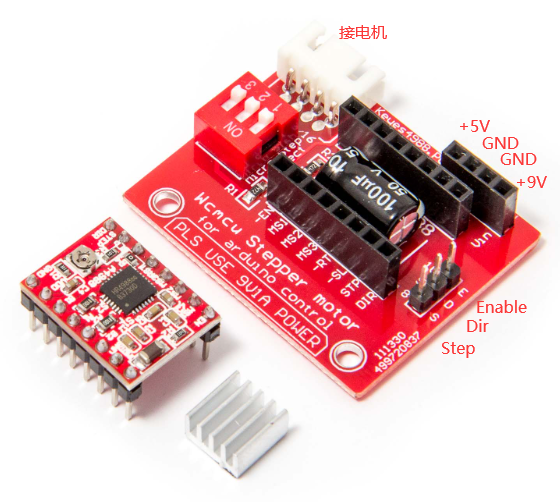
基本介绍:
绕组
常用的步进电机有四根线,1A、1B、2A、2B,1A和1B是一个绕组,2A和2B是一个绕组,用万用表测试1A和1B之间是短路的,2A和2B之间是短路的,1A和1B,2A和2B是等效的。
通常状况下,步进电机可以自由转动(用手可以拧动),1A和1B接在一起的时候,用手拧会感到明显阻力,1A和1B,2A和2B分别接在一起,则阻力更大。
步距角
所谓步进电机,就是可以一步一步进动的电机,每一步旋转的角度就是步距角。常用电机步距角1.8°的较多,也就是每次步进1.8°,旋转一圈需要200步,也说这个步进电机的分辨率是200步。
细分
细分的意义就是提高步进电机分辨率,如果没有细分的话,步进电机每次步进的角度就是步距角,比如1.8°,有了细分,比如16细分,就是把1.8°平均分16份,那么电机的分辨率就变成200*16=3200步了,也就是旋转一圈需要3200步。
其作用简而言之就是降低速度,即每次运行的更慢,保证转动的顺滑度,加速器的作用也是如此。
电流
电流越大,电机扭矩越大。
带传动减速器
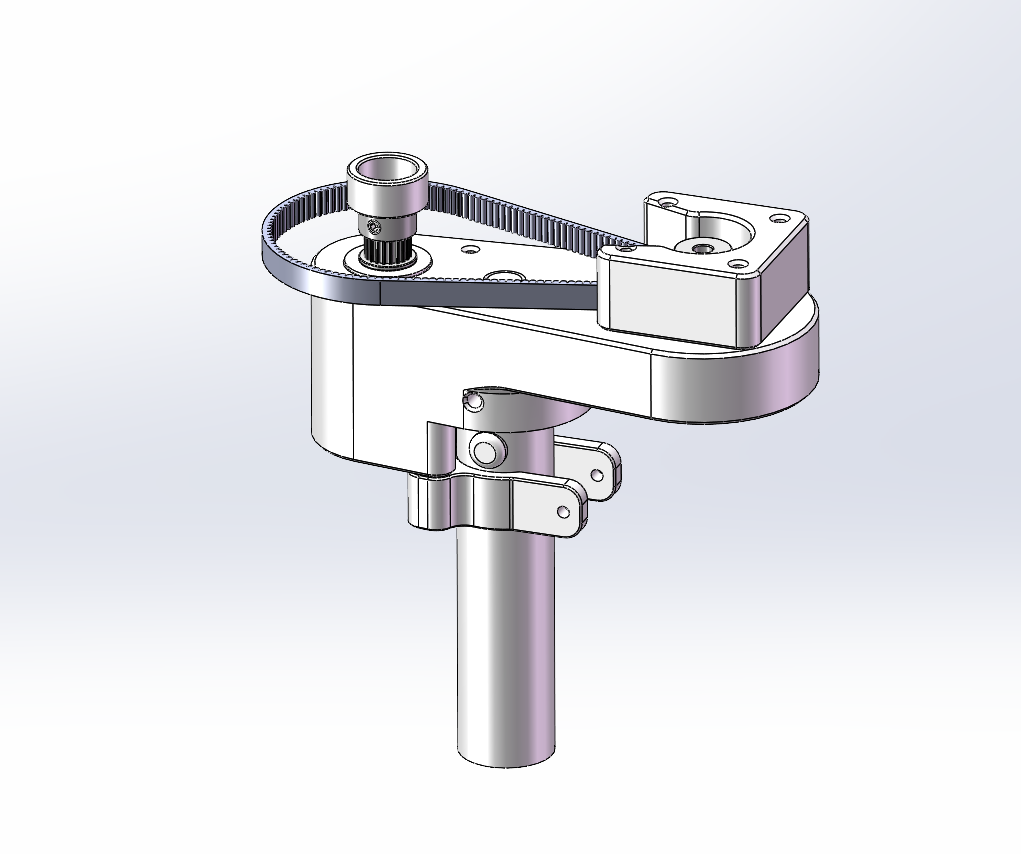
减速器模型图

减速器实拍
由图中可以看出这个加速器是带传动,传动比1:5,整体设计固定在三脚架上,由于步进电机是倒着挂在减速器带轮上,所以实际转向和电机转向相反。
毫米波雷达
接下来是我们这次项目的重点毫米波雷达。
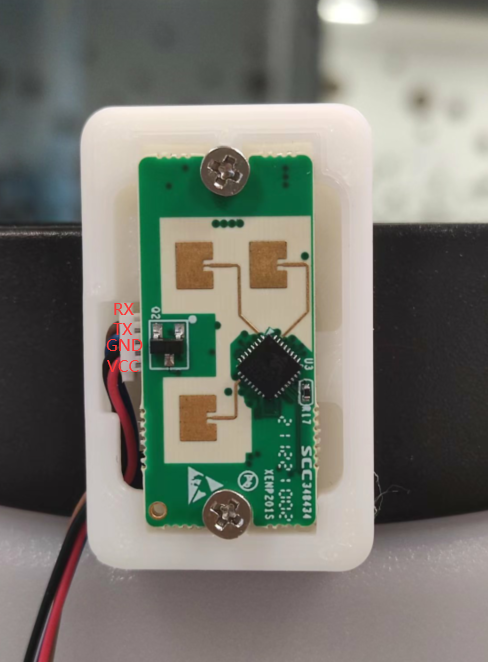
毫米波雷达,是工作在毫米波波段(millimeter wave)探测的雷达。通常毫米波是指30~300GHz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。
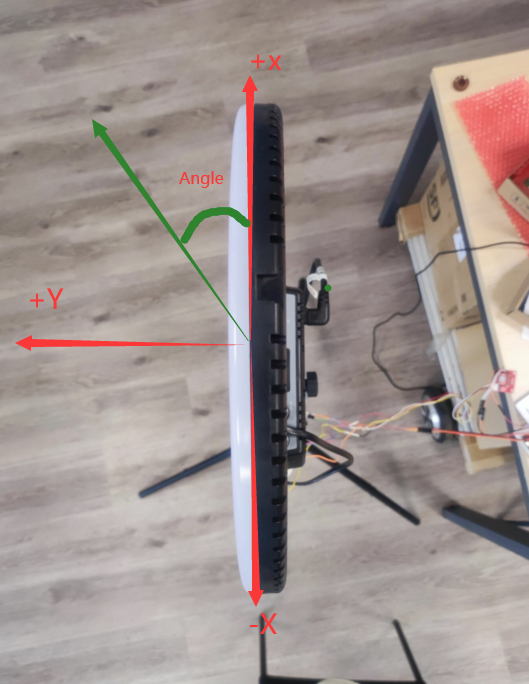
本次项目使用的毫米波雷达是单目标雷达,对动态目标反应明显,上图为该毫米波雷达的正面视图,上面红线是VCC,黑线是GND,蓝线是TX,棕线是RX。
引脚接线
该部分将分为三个部分:
OLED部分
PS:本次项目中OLED的作用仅为将数据显示出来,方便调整;但是由于引脚冲突原因,本次例程中的OLED的接法与之前的接法有所不同。
| OLED屏幕 | OLED | CH549 | 功能 |
|---|
| CS | P3.0 | 片选 |
| RST | P3.1 | 复位 |
| DC | P3.3 | 数据/命令控制 |
| D0 | P1.7 | SCLK时钟 |
| D1 | P1.5 | MOSI数据 |
A4988电机驱动器
| A4988电机驱动器 | A4988 | CH549 | 功能 |
|---|
| E(ENABLE) | GND | 使能,接低电平则模块开始工作,接高电平则模块关机。 |
| D(DIR) | P0.6 | 方向控制,低电平正转,高电平反转。 |
| S(STEP) | P0.7 | 脉冲输入,往这个脚输入一个方波,电机转动一步,也就是(1.8/16)°(以1.8°电机,16细分为例),往这个脚持续输入方波,则电机持续转动。 |
| 5V | +5V | 接CH549正电压 |
| GND | GND | 接地 |
本次的驱动器需要9V的电源,CH549并不能满足要求,所以我们采用外接电源:
| A4988电机驱动器 | A4988 | 外接电源12V | 功能 |
|---|
| 9V | + | 接外接电源正电压 |
| GND | - | 接地 |
其中关于细分的开启,就A4988来说是通过MS1、MS2、MS3高低电平设置细分,在这个板子上有如图所示电位器更方便的改变。
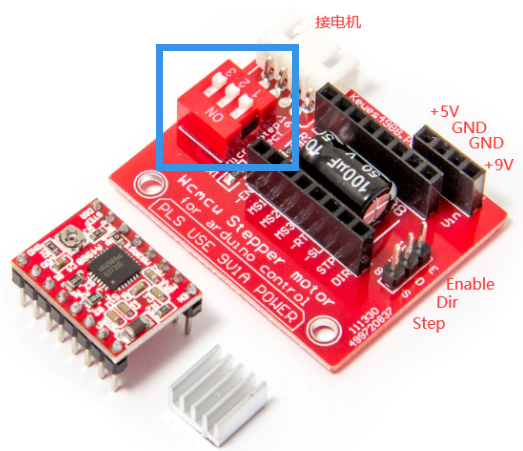
其中具体细分见下表:
| 1(MS1) | 2(MS2) | 3(MS3) | 细分 |
|---|
| Low | Low | Low | 1 |
| High | Low | Low | 1/2 |
| Low | High | Low | 1/4 |
| High | High | Low | 1/8 |
| High | High | High | 1/16 |
PS:本次使用的是1/8。
毫米波雷达
| 毫米波雷达 | 雷达 | CH549 | 功能 |
|---|
| TX | P2.6 | 雷达的TX接CH549中UART1的RX引脚 |
| RX | P2.7 | 雷达的RX接CH549中UART1的TX引脚 |
PS:注意TX对应RX接。
具体程序
PS:本次项目中用到的库,基本之前的教程中均有涉及,基本没变,仅对CH549_SPI.h中的引脚设定做了些许调整,不再赘述,直接说明main.c。
#include <CH549_OLED.h>
#include <CH549_UART.h>
#include <CH549_SPI.h>
#include <CH549_ADC.h>
#include <CH549_GPIO.h>
#include <CH549_DEBUG.h>
#include <CH549_sdcc.h>
#define Direction P0_6 //旋转方向
#define Steps P0_7 //转角步长
#define Clockwise 1 //顺时针
#define Counterclockwise 0 //逆时针
int oled_colum;
int oled_row;
void setCursor(int column,int row); //声明函数
void UART1Init(UINT32 baudrate,UINT8 interrupt)
{
SCON1 &= ~bU1SM0; //选择8位数据通讯
SCON1 |= bU1SMOD; //快速模式
SCON1 |= bU1REN; //使能接收
SBAUD1 = 0 - FREQ_SYS/16/baudrate; //波特率配置
SIF1 = bU1TI; //清空发送完成标志
if(interrupt){ //开启中断使能
IE_UART1 = 1;
EA = 1;
}
}
typedef struct rada
{
int x1Pos;
int y1Pos;
int dist1;
int ang1;
int x2Pos;
int y2Pos;
int dist2;
int ang2;
int x3Pos;
int y3Pos;
int dist3;
int ang3;
UINT8 checksum;
} RadarData;
//解析 XenP201S 的数据
UINT8 decode_XenP201S( char* buf,RadarData* radar){
radar->x1Pos = (((int)buf[2]<<8)+buf[1]);
radar->y1Pos = (((int)buf[4]<<8)+buf[3]);
radar->dist1 = (((int)buf[6]<<8)+buf[5]);
radar->ang1 = (((int)buf[8]<<8)+buf[7]);
radar->ang1 = radar->ang1 / 10.0 - 90;
radar->x2Pos = (((int)buf[10]<<8)+buf[9]);
radar->y2Pos = (((int)buf[12]<<8)+buf[11]);
radar->dist2 = (((int)buf[14]<<8)+buf[13]);
radar->ang2 = (((int)buf[16]<<8)+buf[15]);
radar->ang2 = radar->ang2 / 10.0 - 90;
radar->x3Pos = (((int)buf[18]<<8)+buf[17]);
radar->y3Pos = (((int)buf[20]<<8)+buf[19]);
radar->dist3 = (((int)buf[22]<<8)+buf[21]);
radar->ang3 = (((int)buf[24]<<8)+buf[23]);
radar->ang3 = radar->ang3 / 10.0 - 90;
return 0;
}
void LightTurn(BOOL Dir, UINT16 Deg) //补光灯旋转
{
GPIO_Init(PORT0,PIN6,MODE1);
UINT16 STEP;
STEP = Deg * 5 * 8 / 1.8; //实际步长为角度/1.8,开的1/8档位,并且1:5减速
Direction = Dir;
setCursor(0,4);
printf_fast_f("D:%d S:%3d G:%2d",Dir,STEP,Deg);
for (UINT16 i = 0; i < STEP; i++) //根据1s内调整旋转时间延迟
{
Steps = 1;
mDelayuS(1000000/STEP);
Steps = 0;
mDelayuS(1000000/STEP);
}
}
void FaceTrack( int A) //捕获动作
{
if ( A < 85) //由于数据每1s都会不断跳动,保证在一定范围内固定补光
{
LightTurn(Counterclockwise, 1+(90-A)*5/9);
}
if ( A > 95)
{
LightTurn(Clockwise, 1+(A-90)*5/9);
}
}
volatile UINT8 recvBuf[30];
volatile UINT8 pBuf = 0;
volatile UINT8 fRecv = 0;
int xPos,yPos;
void main()
{
CfgFsys( ); //CH549时钟选择配置
mDelaymS(20);
UART1Init(115200,1);
// GPIO_Init(PORT0,PIN6,MODE1);
SPIMasterModeSet(3); //SPI主机模式设置,模式3
SPI_CK_SET(4); //设置SPI sclk 时钟信号分频
OLED_Init(); //初始化OLED
OLED_Clear(); //将OLED屏幕上内容清除
setFontSize(8); //设置文字大小
OLED_Clear();
setCursor(0,0);
printf_fast_f("Radar");
RadarData object;
while(1){
if(fRecv){
fRecv = 0;
if (pBuf == 28){
pBuf = 0;
IE_UART1 = 0;
setCursor(0,3);
if(recvBuf[0]==0XAA && recvBuf[26]==0X55 && recvBuf[27]==0XCC){
// RadarData object;
decode_XenP201S(recvBuf,&object);
setCursor(0,0);
printf_fast_f("X :%5d%5d%5d",object.x1Pos,object.x2Pos,object.x3Pos);
setCursor(0,1);
printf_fast_f("Y :%5d%5d%5d",object.y1Pos,object.y2Pos,object.y3Pos);
setCursor(0,2);
printf_fast_f("D :%5d%5d%5d",object.dist1,object.dist2,object.dist3);
setCursor(0,3);
printf_fast_f("A :%5d%5d%5d",object.ang1,object.ang2,object.ang3);
// FaceTrack(object.ang1);
}
else{
setCursor(0,0);
printf_fast_f(" %x %x %x ",recvBuf[0],recvBuf[26],recvBuf[27]);
}
IE_UART1 = 1;
FaceTrack(object.ang1);
}
if(recvBuf[0]!=0XAA){
P2_2 = 0;
pBuf=0;
}else{
P2_2 =1;
}
}
}
}
/********************************************************************
* 函 数 名 : putchar
* 函数功能 : 将printf映射到OLED屏幕输出上
* 输 入 : 字符串
* 输 出 : 字符串
********************************************************************/
int putchar( int a)
{
//在光标处显示文字 a
OLED_ShowChar(oled_colum,oled_row,a);
//将光标右移一个字的宽度,以显示下一个字
oled_colum+=6;
/*当此行不足以再显示一个字时,换行.
同时光标回到最边(列坐标=0).
*/
if (oled_colum>122){oled_colum=0;oled_row+=1;}
return(a);
}
/********************************************************************
* 函 数 名 : setCursor
* 函数功能 : 设置光标(printf到屏幕上的字符串起始位置)
* 输 入 : 行坐标 列坐标(此处一行为8个像素,一列为1个像素,所以屏幕上共有8行128列)
* 输 出 : 无
********************************************************************/
void setCursor(int column,int row)
{
oled_colum = column;
oled_row = row;
}
void UART1Interrupt(void) __interrupt INT_NO_UART1 __using 1 {
pBuf%=28;
recvBuf[pBuf] = CH549UART1RcvByte();
pBuf++;
fRecv = 1;
}
分部说明
毫米波雷达数据读取
typedef struct rada
{
int x1Pos;
int y1Pos;
int dist1;
int ang1;
int x2Pos;
int y2Pos;
int dist2;
int ang2;
int x3Pos;
int y3Pos;
int dist3;
int ang3;
UINT8 checksum;
} RadarData;
//解析 XenP201S 的数据
UINT8 decode_XenP201S( char* buf,RadarData* radar){
radar->x1Pos = (((int)buf[2]<<8)+buf[1]);
radar->y1Pos = (((int)buf[4]<<8)+buf[3]);
radar->dist1 = (((int)buf[6]<<8)+buf[5]);
radar->ang1 = (((int)buf[8]<<8)+buf[7]);
radar->ang1 = radar->ang1 / 10.0 - 90;
radar->x2Pos = (((int)buf[10]<<8)+buf[9]);
radar->y2Pos = (((int)buf[12]<<8)+buf[11]);
radar->dist2 = (((int)buf[14]<<8)+buf[13]);
radar->ang2 = (((int)buf[16]<<8)+buf[15]);
radar->ang2 = radar->ang2 / 10.0 - 90;
radar->x3Pos = (((int)buf[18]<<8)+buf[17]);
radar->y3Pos = (((int)buf[20]<<8)+buf[19]);
radar->dist3 = (((int)buf[22]<<8)+buf[21]);
radar->ang3 = (((int)buf[24]<<8)+buf[23]);
radar->ang3 = radar->ang3 / 10.0 - 90;
return 0;
}
电机驱动与人脸捕获追踪
void LightTurn(BOOL Dir, UINT16 Deg) //补光灯旋转
{
GPIO_Init(PORT0,PIN6,MODE1);
UINT16 STEP;
STEP = Deg * 5 * 8 / 1.8; //实际步长为角度/1.8,开的1/8档位,并且1:5减速
Direction = Dir;
setCursor(0,4);
printf_fast_f("D:%d S:%3d G:%2d",Dir,STEP,Deg);
for (UINT16 i = 0; i < STEP; i++) //根据1s内调整旋转时间延迟
{
Steps = 1;
mDelayuS(1000000/STEP);
Steps = 0;
mDelayuS(1000000/STEP);
}
}
void FaceTrack( int A) //捕获动作
{
if ( A < 85) //由于数据每1s都会不断跳动,保证在一定范围内固定补光
{
LightTurn(Counterclockwise, 1+(90-A)*5/9);
}
if ( A > 95)
{
LightTurn(Clockwise, 1+(A-90)*5/9);
}
}
这部分基本按照我之前所介绍的:
- 首先将P0.6设定为推挽输出,这样方便用0和1按位控制电机正反转,即控制补光灯的旋转方向;
- 由于本身函数输入的是角度,所以转换为步长,为了精确度先乘再除,即1:5减速和1/8细分,然后每步1.8°;
- 然后由于本身雷达检测是1s一次,那么设计补光灯的旋转速度也得按着这个来,这样才能让补光灯的旋转更加顺滑,而不是经常出现卡顿,也可以随着观测个体的移动距离调整旋转速度,即1000000us去除实际步长,而先给P0.7传先高后低的电压,让他按这个速度旋转;
- 本身雷达是1s测一次数据,每次数据都会有一定的变化,即使被捕获目标不动,也会产生略微的变化,所以另一个函数规定在一定角度范围内补光灯不再旋转,旋转的角度是自己测试后写成的表达式。
串口1中断
int oled_colum;
int oled_row;
void setCursor(int column,int row); //声明函数
void UART1Init(UINT32 baudrate,UINT8 interrupt)
{
SCON1 &= ~bU1SM0; //选择8位数据通讯
SCON1 |= bU1SMOD; //快速模式
SCON1 |= bU1REN; //使能接收
SBAUD1 = 0 - FREQ_SYS/16/baudrate; //波特率配置
SIF1 = bU1TI; //清空发送完成标志
if(interrupt){ //开启中断使能
IE_UART1 = 1;
EA = 1;
}
}
volatile UINT8 recvBuf[30];
volatile UINT8 pBuf = 0;
volatile UINT8 fRecv = 0;
int xPos,yPos;
void main()
{
CfgFsys( ); //CH549时钟选择配置
mDelaymS(20);
UART1Init(115200,1);
// GPIO_Init(PORT0,PIN6,MODE1);
SPIMasterModeSet(3); //SPI主机模式设置,模式3
SPI_CK_SET(4); //设置SPI sclk 时钟信号分频
OLED_Init(); //初始化OLED
OLED_Clear(); //将OLED屏幕上内容清除
setFontSize(8); //设置文字大小
OLED_Clear();
setCursor(0,0);
printf_fast_f("Radar");
RadarData object;
while(1){
if(fRecv){
fRecv = 0;
if (pBuf == 28){
pBuf = 0;
IE_UART1 = 0;
setCursor(0,3);
if(recvBuf[0]==0XAA && recvBuf[26]==0X55 && recvBuf[27]==0XCC){
// RadarData object;
decode_XenP201S(recvBuf,&object);
setCursor(0,0);
printf_fast_f("X :%5d%5d%5d",object.x1Pos,object.x2Pos,object.x3Pos);
setCursor(0,1);
printf_fast_f("Y :%5d%5d%5d",object.y1Pos,object.y2Pos,object.y3Pos);
setCursor(0,2);
printf_fast_f("D :%5d%5d%5d",object.dist1,object.dist2,object.dist3);
setCursor(0,3);
printf_fast_f("A :%5d%5d%5d",object.ang1,object.ang2,object.ang3);
// FaceTrack(object.ang1);
}
else{
setCursor(0,0);
printf_fast_f(" %x %x %x ",recvBuf[0],recvBuf[26],recvBuf[27]);
}
IE_UART1 = 1;
FaceTrack(object.ang1);
}
if(recvBuf[0]!=0XAA){
P2_2 = 0;
pBuf=0;
}else{
P2_2 =1;
}
}
}
}
/********************************************************************
* 函 数 名 : putchar
* 函数功能 : 将printf映射到OLED屏幕输出上
* 输 入 : 字符串
* 输 出 : 字符串
********************************************************************/
int putchar( int a)
{
//在光标处显示文字 a
OLED_ShowChar(oled_colum,oled_row,a);
//将光标右移一个字的宽度,以显示下一个字
oled_colum+=6;
/*当此行不足以再显示一个字时,换行.
同时光标回到最边(列坐标=0).
*/
if (oled_colum>122){oled_colum=0;oled_row+=1;}
return(a);
}
/********************************************************************
* 函 数 名 : setCursor
* 函数功能 : 设置光标(printf到屏幕上的字符串起始位置)
* 输 入 : 行坐标 列坐标(此处一行为8个像素,一列为1个像素,所以屏幕上共有8行128列)
* 输 出 : 无
********************************************************************/
void setCursor(int column,int row)
{
oled_colum = column;
oled_row = row;
}
void UART1Interrupt(void) __interrupt INT_NO_UART1 __using 1 {
pBuf%=28;
recvBuf[pBuf] = CH549UART1RcvByte();
pBuf++;
fRecv = 1;
}
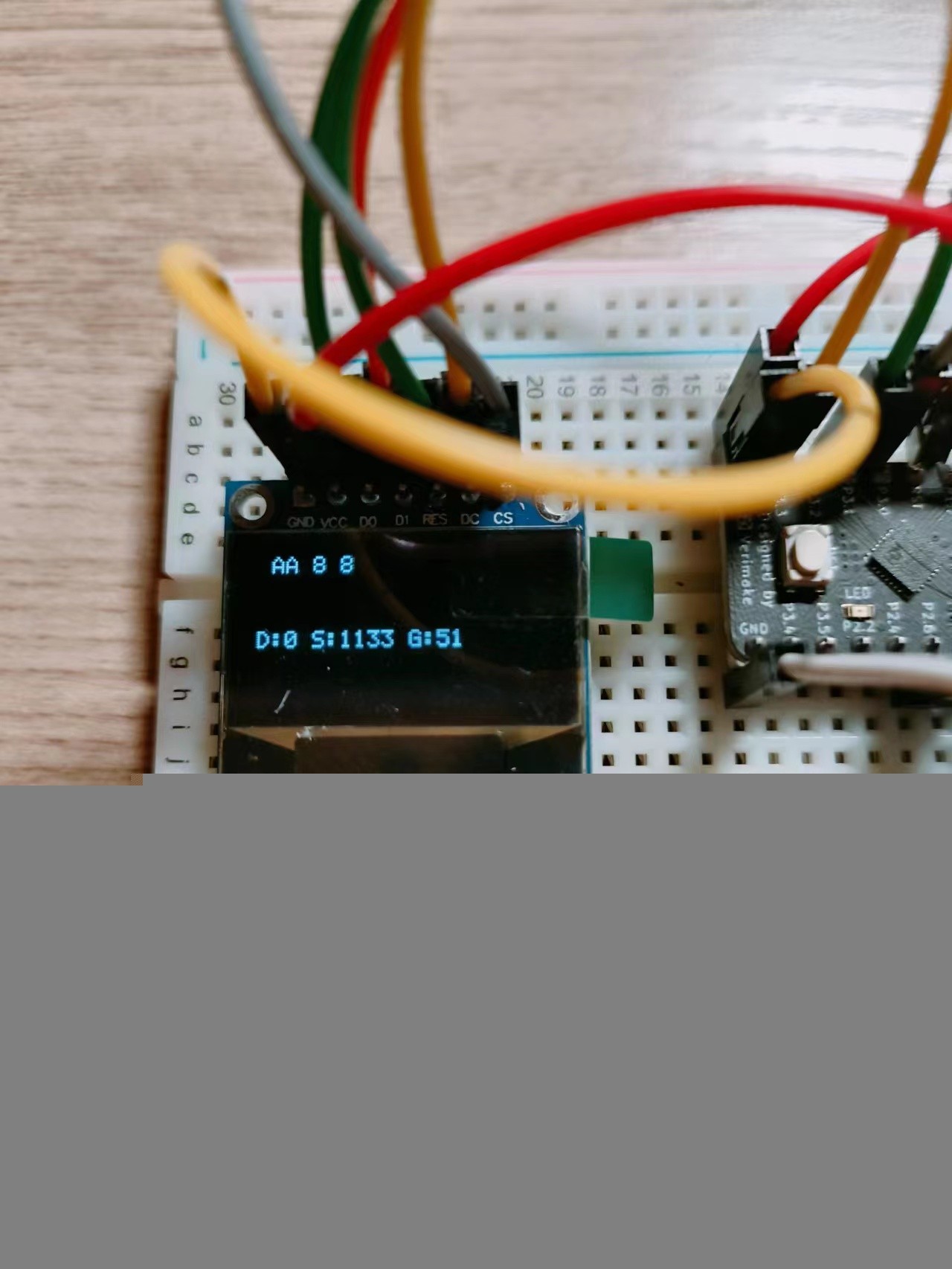
由于本身毫米波雷达在此次项目中是通过UART1传输的数据,设计了通过串口1中断来将接收数据,接收到之后直接通过OLED屏幕将数据展示出来;

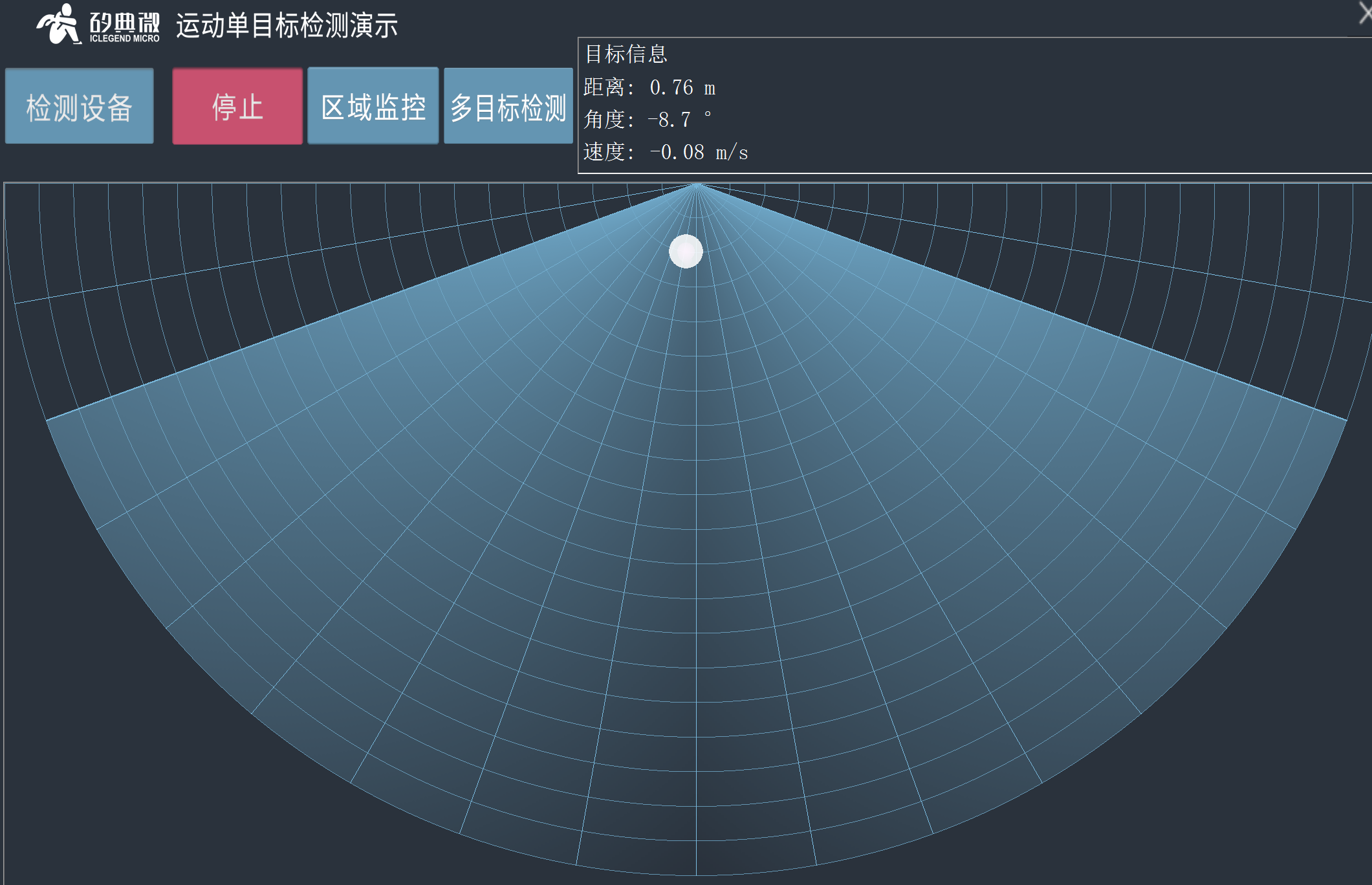
其中X,Y即为坐标系位置,D为目标距离雷达距离,A为被测目标到雷达这条线与+x的夹角,D为电机旋转方向,S为该次步长,G为该次旋转角度,具体如下图:
其中向屏幕发送数据的时候将中断关闭,中断打开的时候再打开之前写好的追踪函数,这样就可以保证检测数据的1s内,补光灯也在转动,减少卡顿,保证顺滑感。
具体演示
本部分通过之前一直用的那种GIF不太好展示,这里直接指路b站verimake发布的视频《基于毫米波传感器的人体定位跟踪补光灯》,这里有较为完整的演示。
后话
至此这次的智能追踪补光灯的解说就到此结束了,有兴趣的同学可以自己试试。毫米波雷达很使用,用途还有很多,这次仅展示他的一部分能力,其他的用途等同学们思考了。这次的例程我将上传至gitee仓库上文件名为:
欢迎大家参考!



 网站备案号:ICP备16046599号-1
网站备案号:ICP备16046599号-1