框体搭建
材料
1.铝型材:
2020铝型材:1500mm ×2根、960mm ×10根
2040-4孔平面铝角码 ×8个
4020-4孔平面铝角码 ×4个
2020-2孔平面铝角码 ×16个
欧标20 M3弹珠螺母 ×60个
欧标20 M5 T型螺母 ×60个
M5*8 半圆头螺栓 ×60个
2. 螺丝与弹簧
M3×10 沉头机牙螺丝 ×60个
弹簧 0.5×8×40 ×20个
弹簧 0.6×8×40 ×10个
3.舵机
sg90s 9g 舵机 ×30个
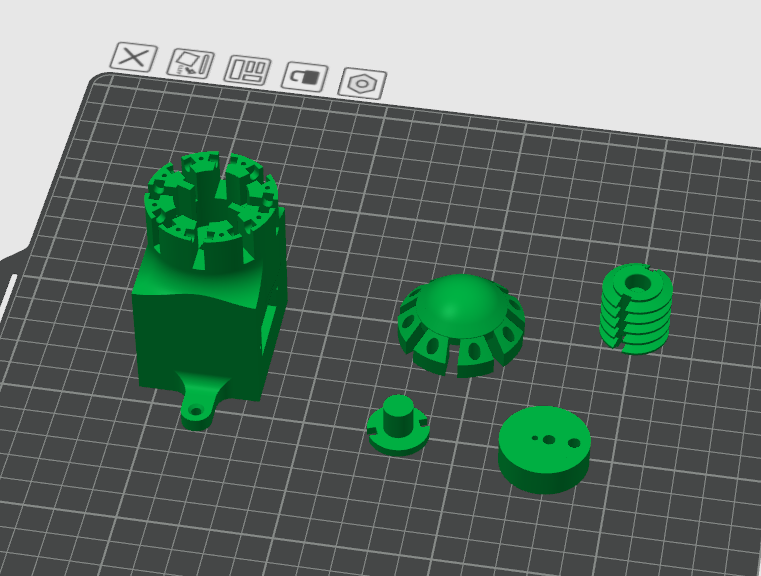
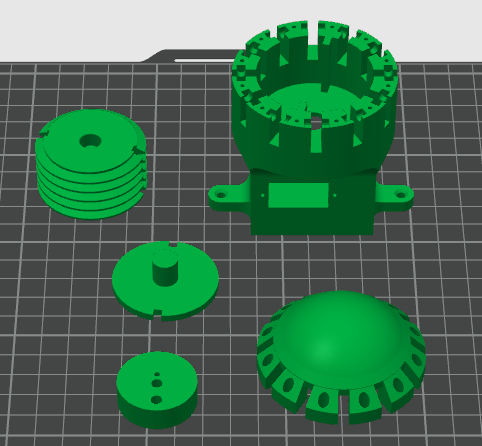
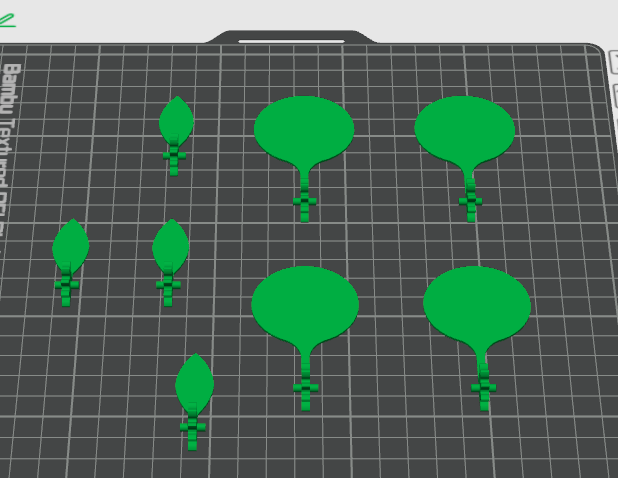
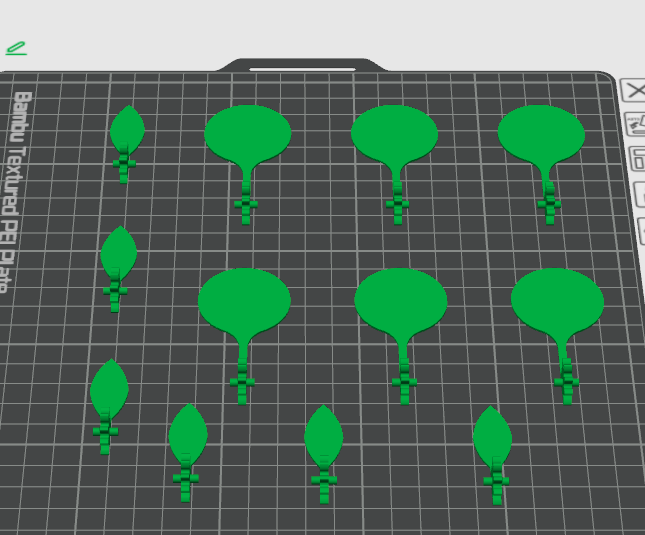
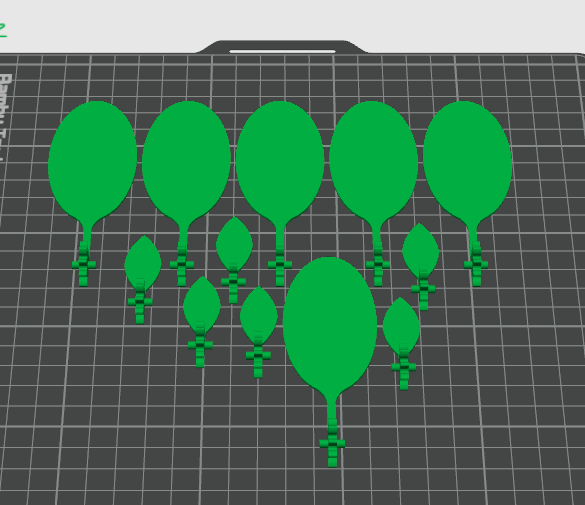
4.3D打印件
花有三种模型
花1: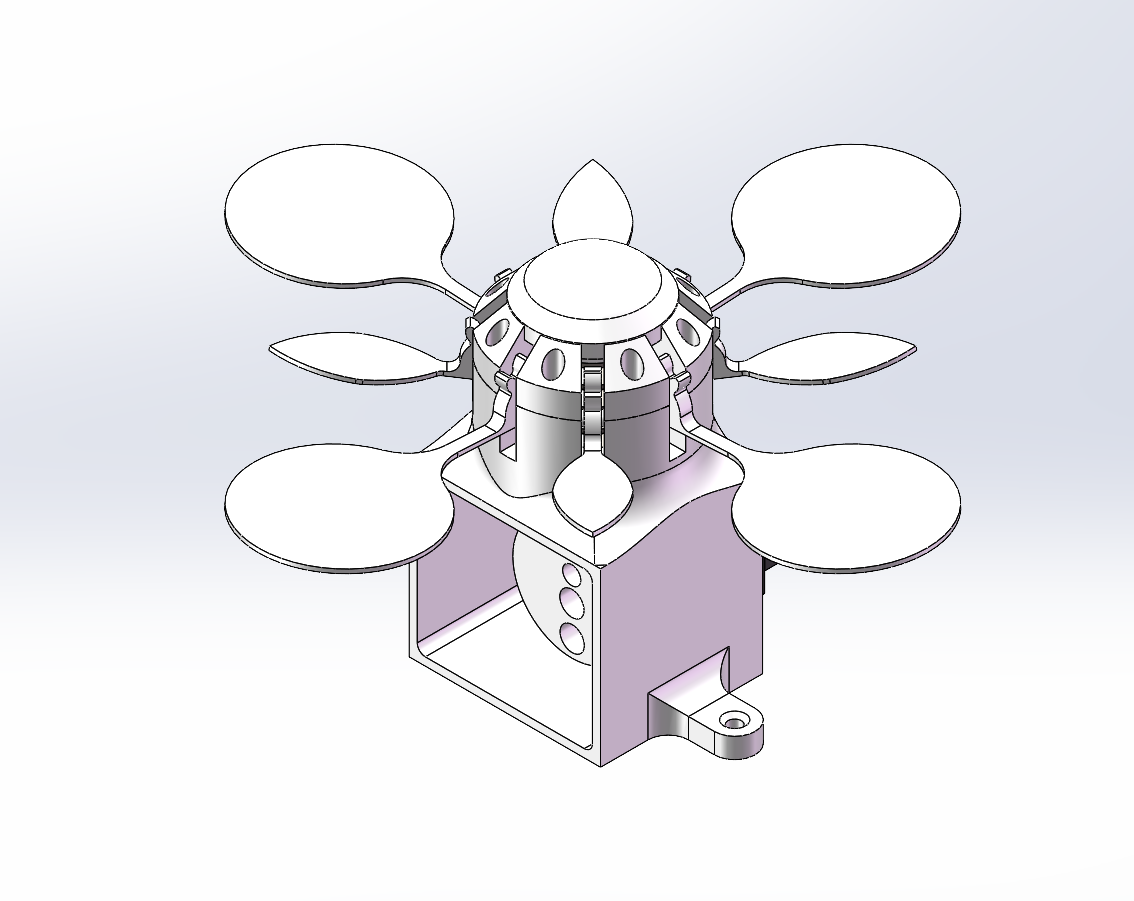
花2: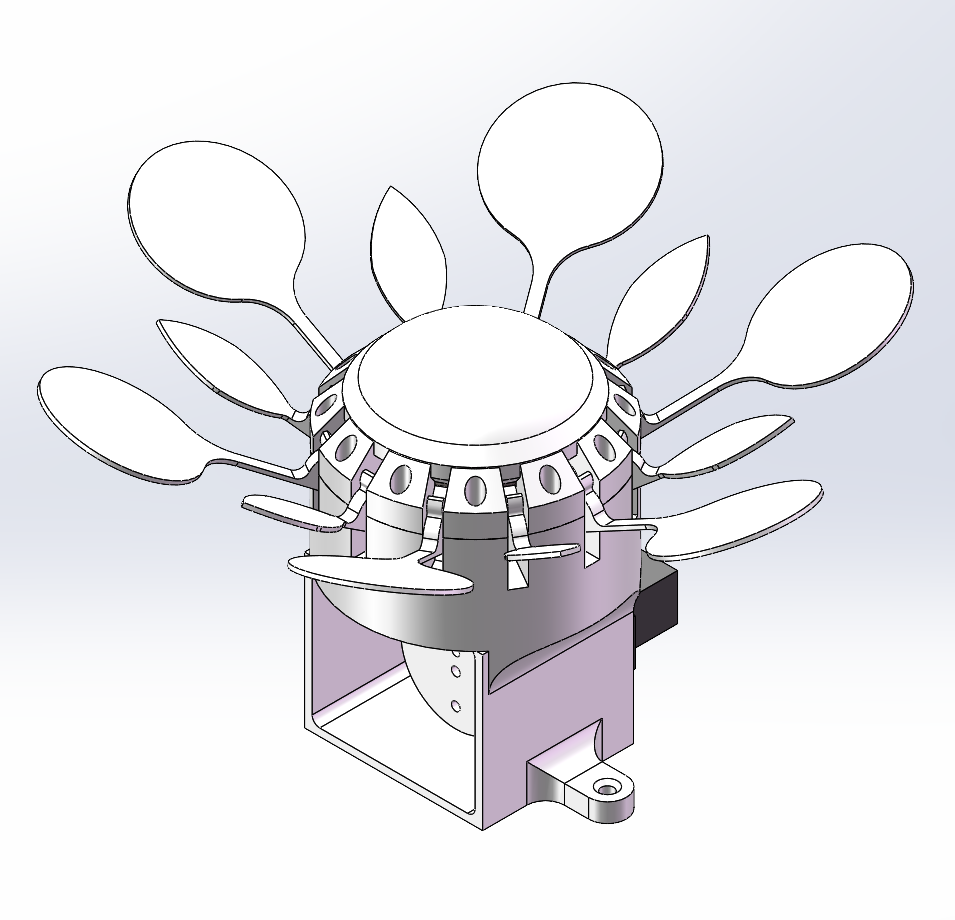
花3: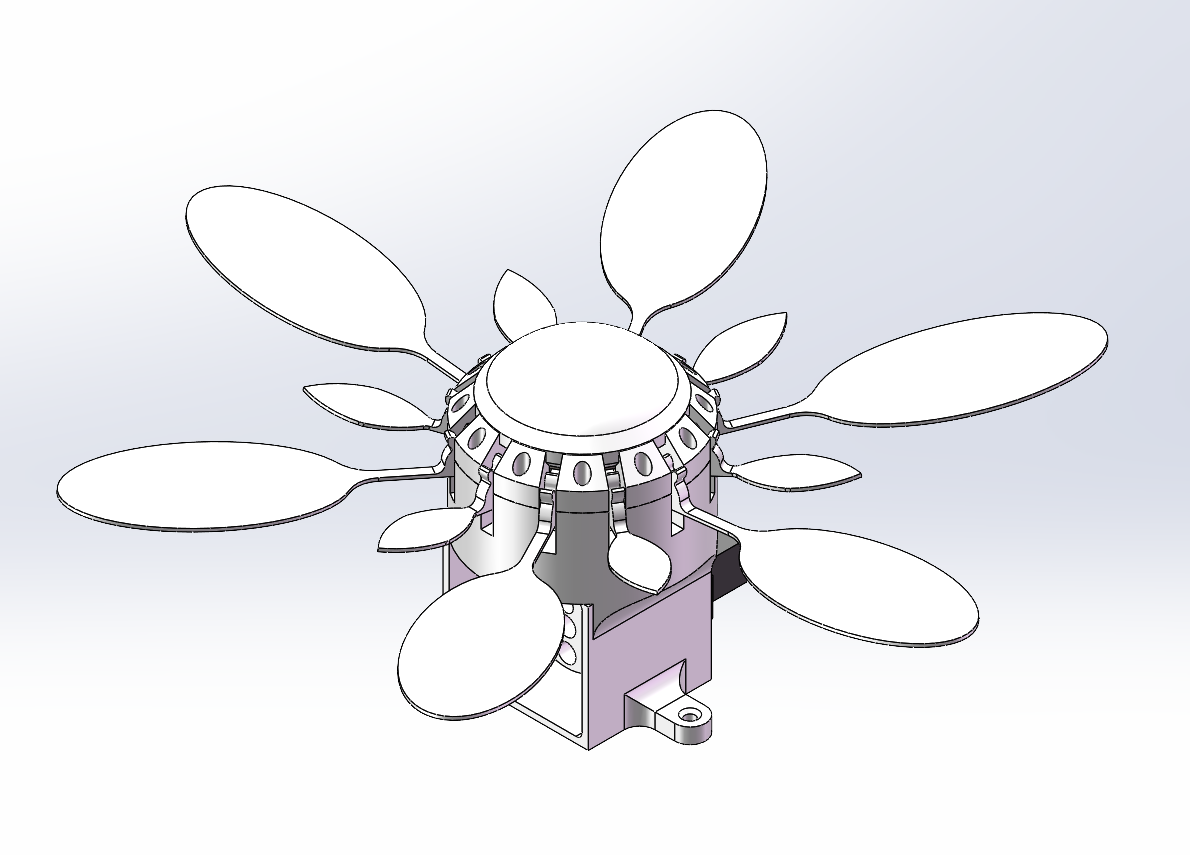
其中花2和花3除了花瓣不一样,其他都一样
用不同颜色的材料打印他们
安装
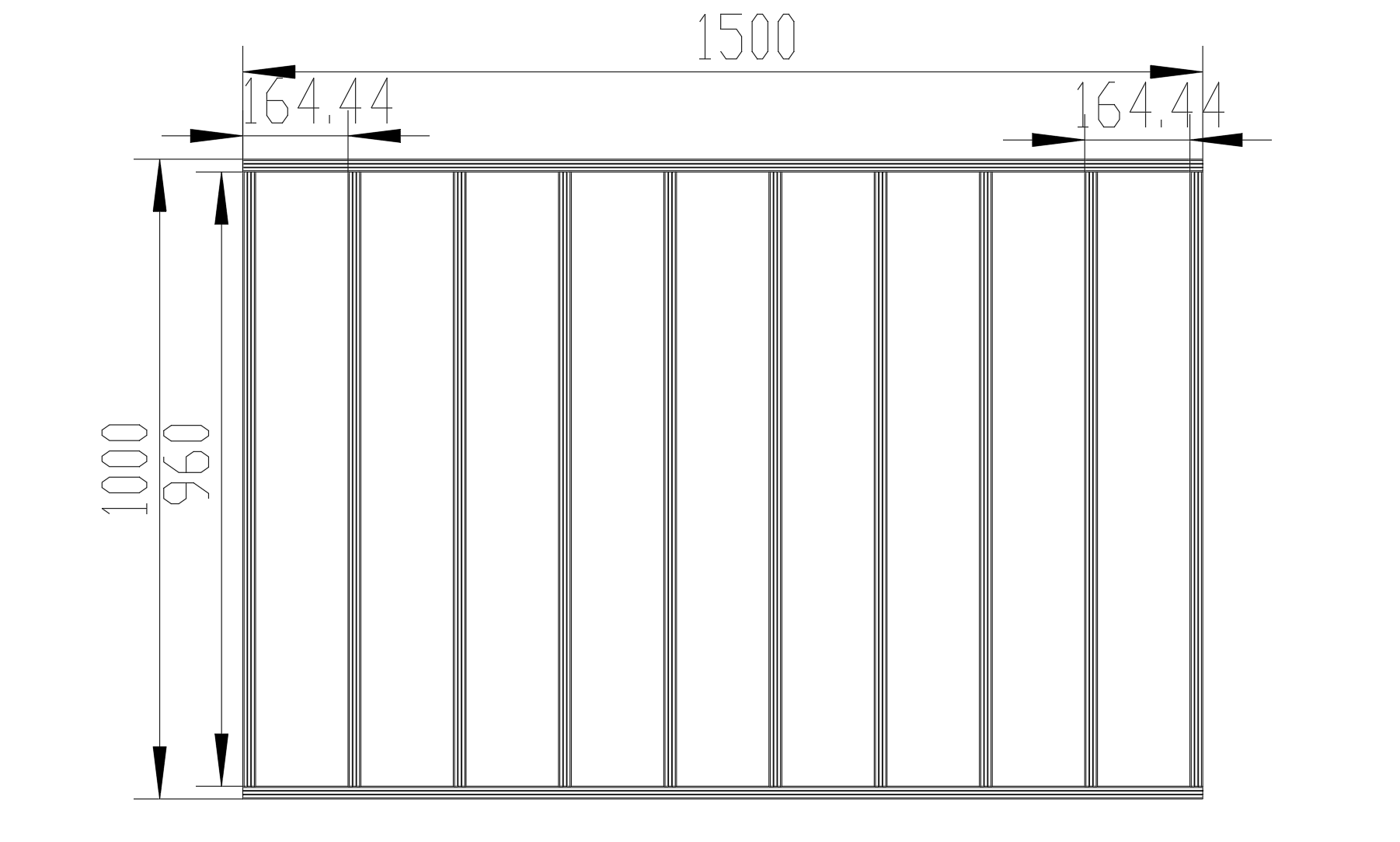
1.将铝型材按照图示组装好
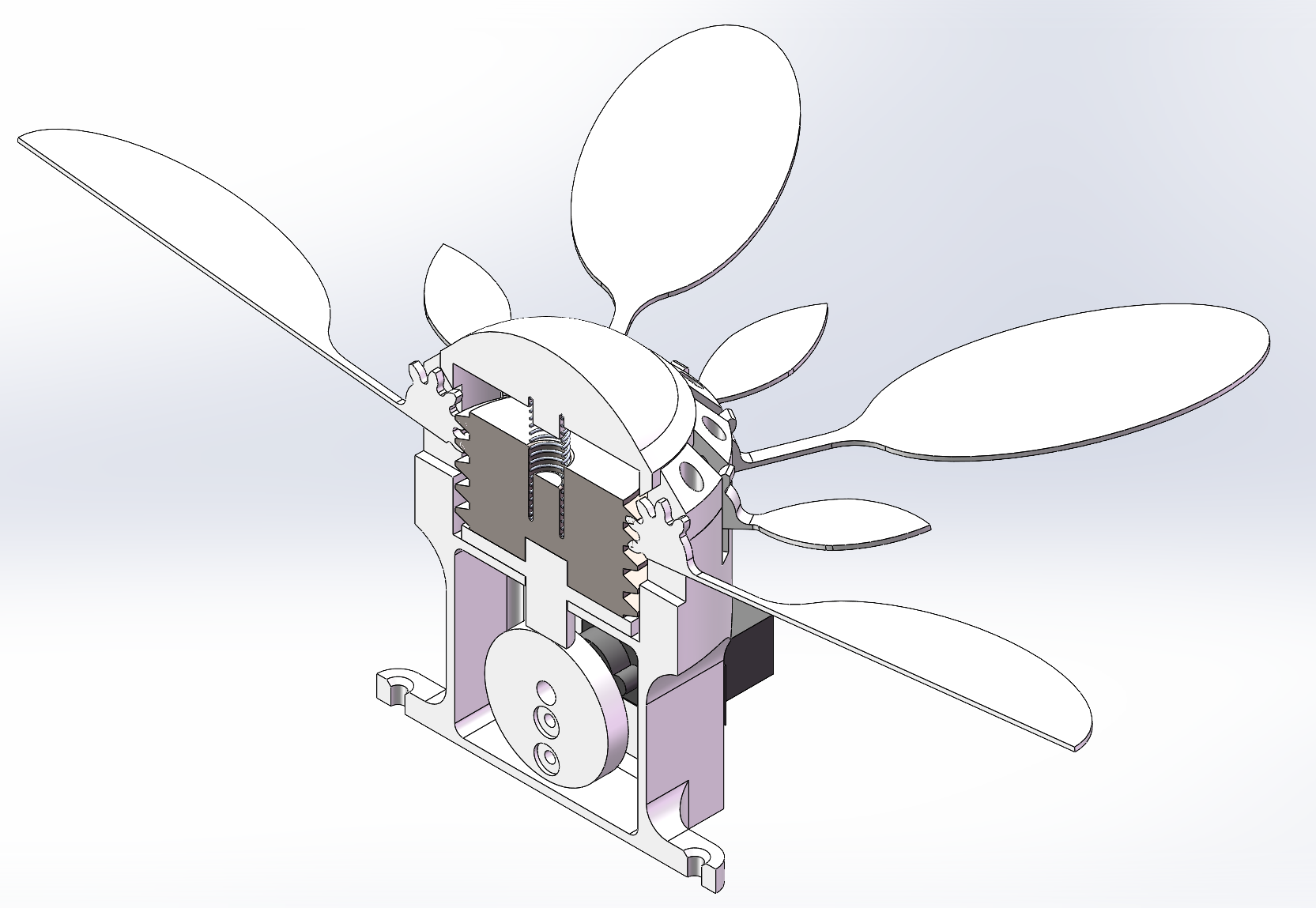
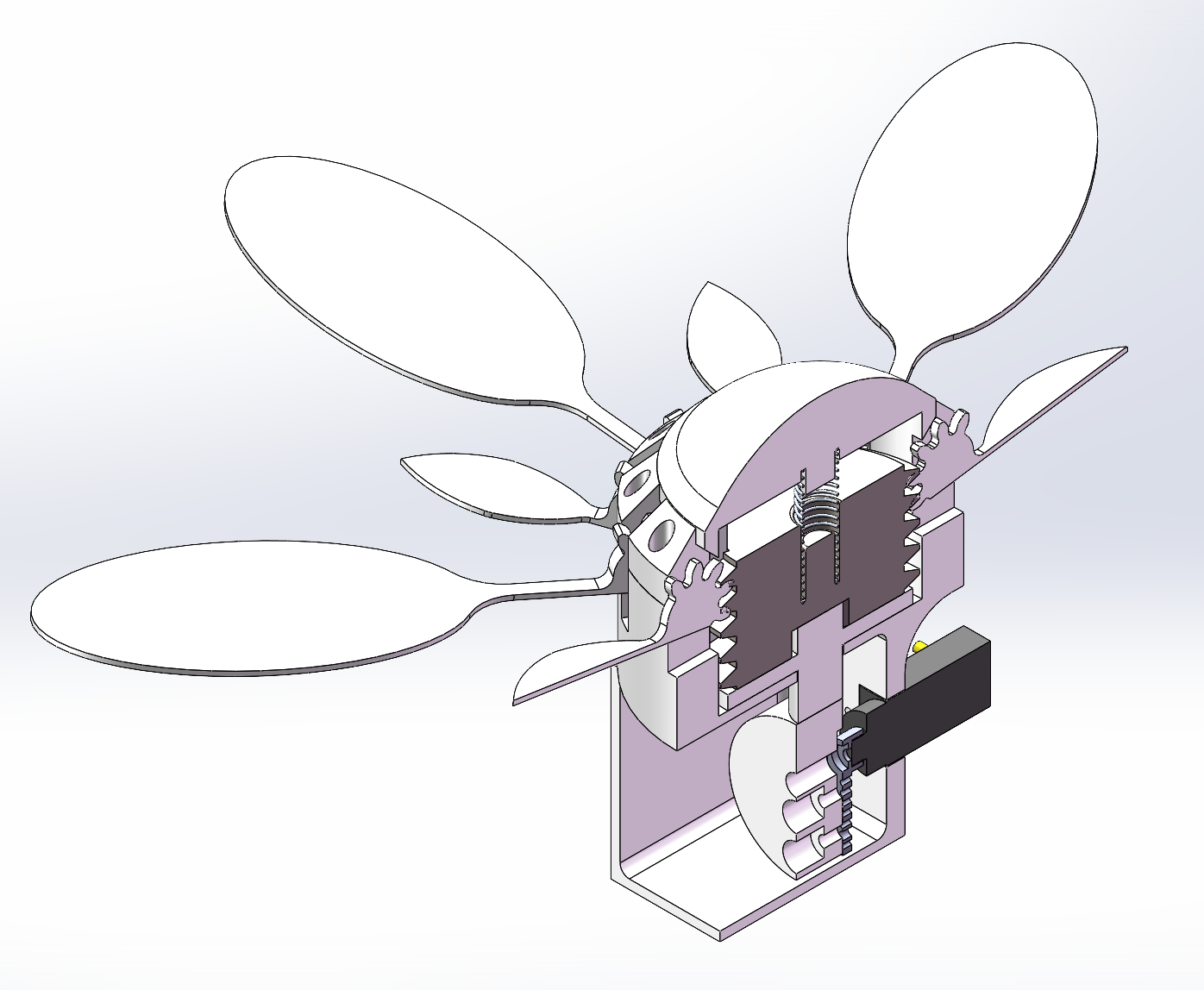
2.将3D打印的零件组装成三种花
三种花的安装方式一致,零件位置相同
3.将组装好的花按照自己想象的位置安装在铝型材框架上

电路设计
设计思路
1.使用多块舵机控制板控制舵机
2.使用毫米波雷达感应人体位置
2.使用一块主机用于接收传感器消息并下发舵机控制指令
3.12V电源输入供电,使用buck电路将12V降压到5V给电路板供电
4.通讯电路采用485通讯线
舵机控制原理图
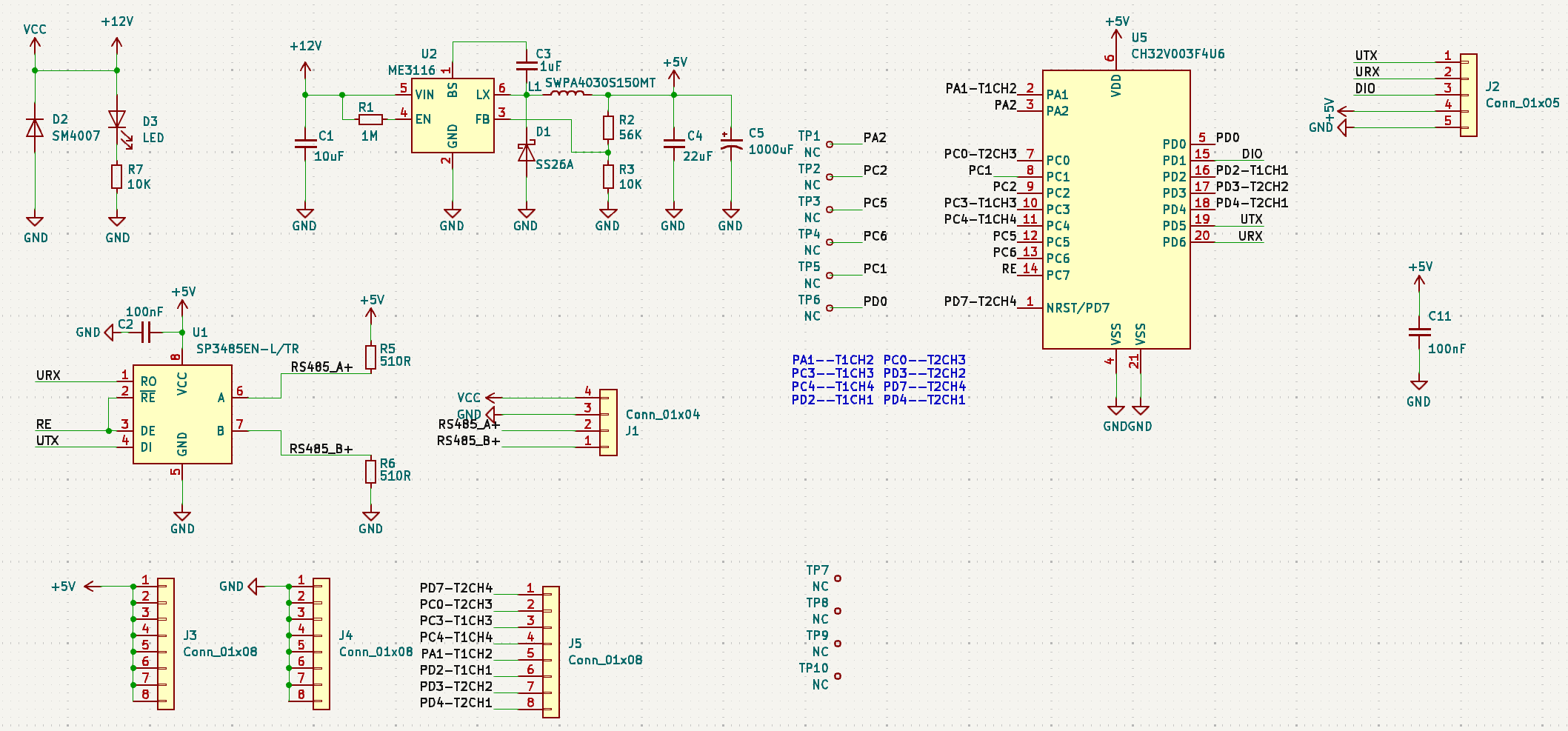
舵机控制板电路图
舵机控制板3D实物图
主控制板元件清单
| 位号 | 封装 | 数量 | 参数 |
|---|
| C1 | 603 | 1 | 10uF |
| C11, C2 | 402 | 2 | 100nF |
| C3 | 603 | 1 | 1uF |
| C4 | 805 | 1 | 22uF |
| C5 | C_Radial_D10.0mm_H20.0mm_P5.00mm | 1 | 1000uF |
| D1 | D_SMA | 1 | SS26A |
| D2 | D_SOD-123F | 1 | SM4007 |
| D3 | LED_0603 | 1 | LED |
| J1 | JST_PH_B4B-PH-K_1x04_P2.00mm_Vertical | 1 | WAFER-PH2.0-4PZZ |
| J2 | PinHeader_1x05_P1.00mm_Vertical | 1 | Conn_01x05 |
| J3, J4, J5 | PinHeader_1x08_P2.54mm_Vertical | 3 | Conn_01x08 |
| L1 | L_Bourns-SRN4018 | 1 | SWPA4030S150MT |
| R1 | 402 | 1 | 1M |
| R2 | 402 | 1 | 56K |
| R3, R7 | 402 | 2 | 10K |
| R5, R6 | 805 | 2 | 510R |
| TP1-TP6 | TestPoint_Pad_2.0x2.0mm | 6 | NC |
| TP7-TP10 | MountingHole_3.2mm_M3_Pad_Via | 4 | NC |
| U1 | SOIC-8_3.9x4.9mm_P1.27mm | 1 | SP3485EN-L/TR |
| U2 | SOT-23-6 | 1 | ME3116 |
| U5 | QFN-20-1EP_3x3mm_P0.4mm_EP1.65x1.65mm_ThermalVias | 1 | CH32V003F4U6 |
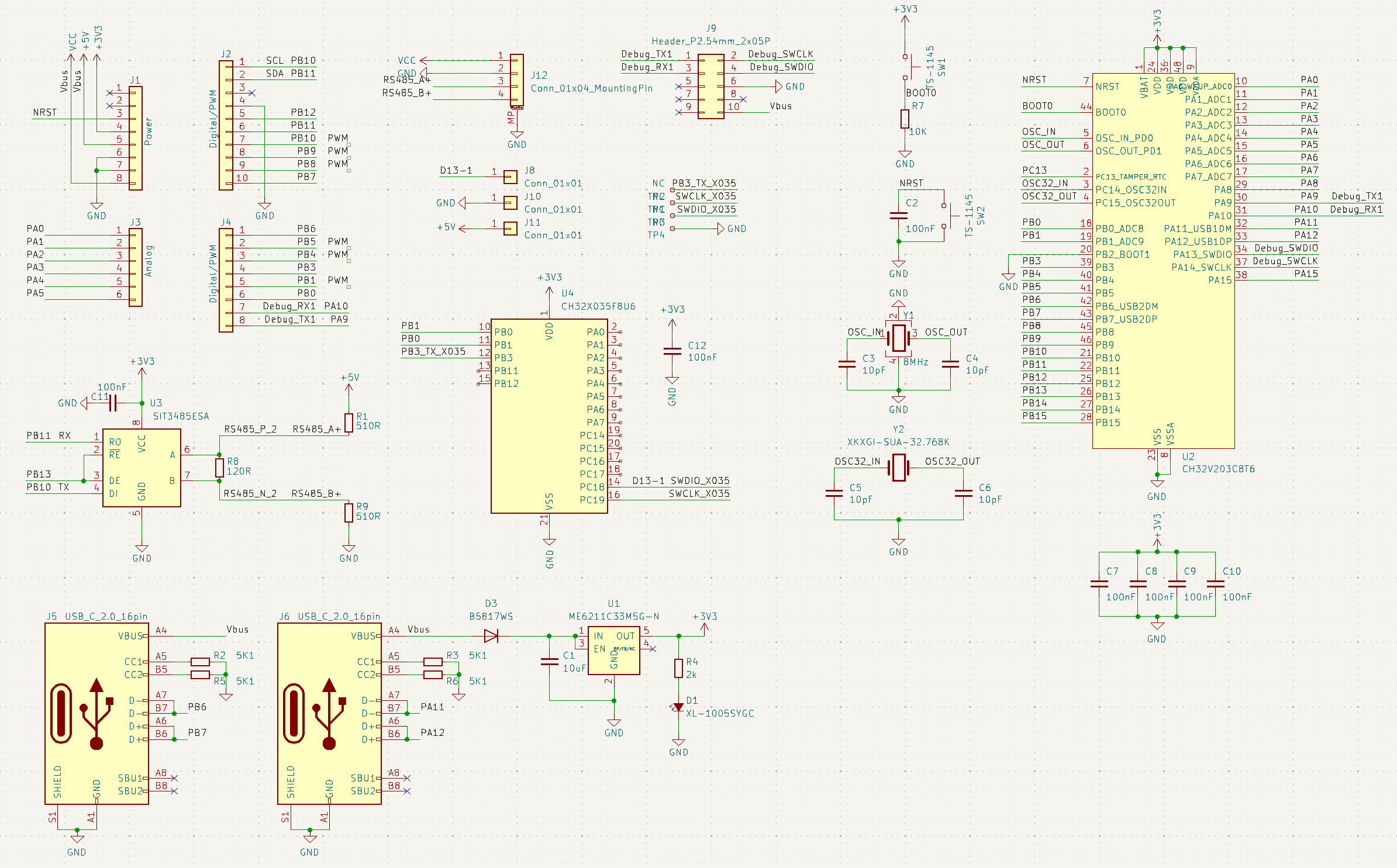
主控制板原理图
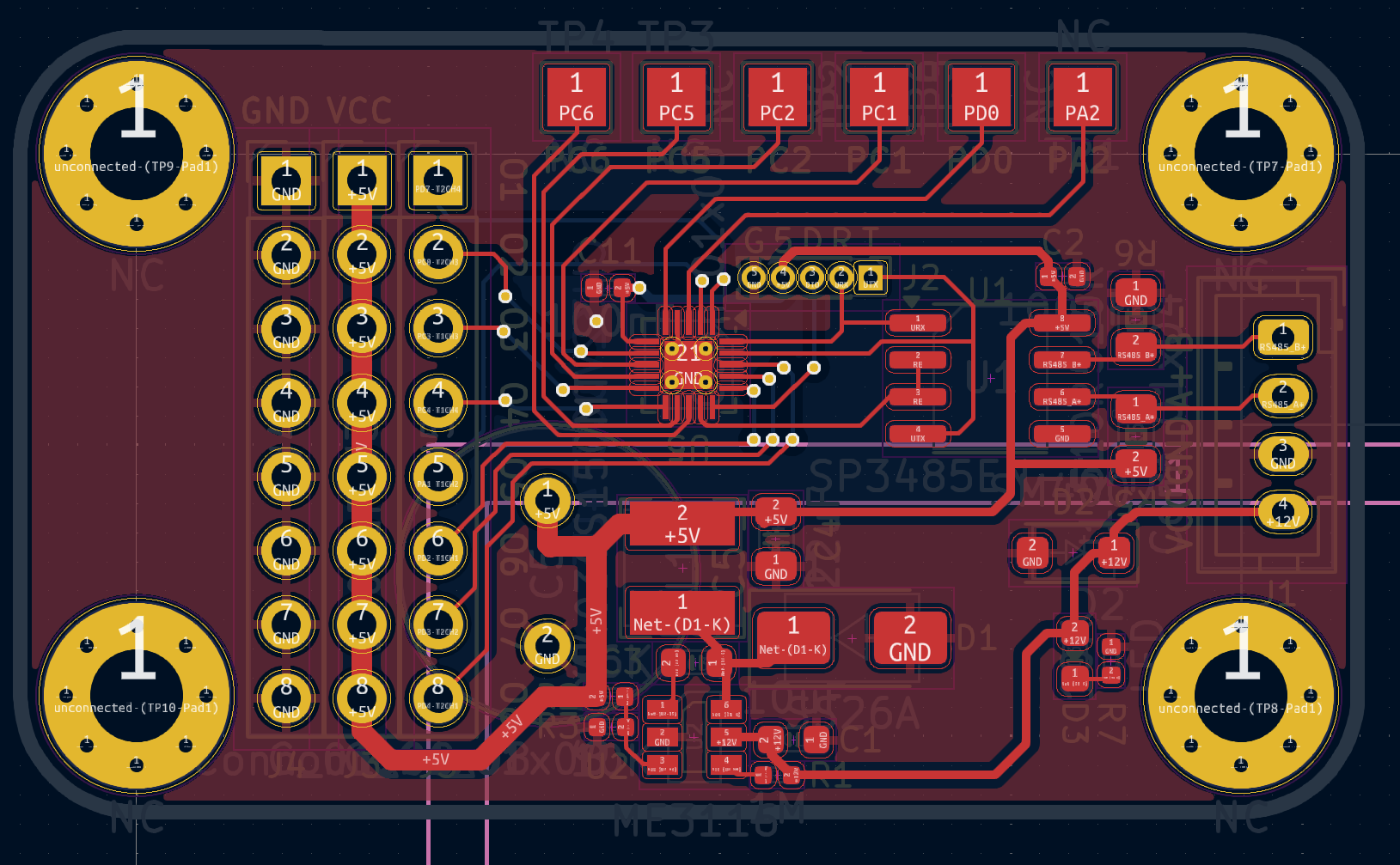
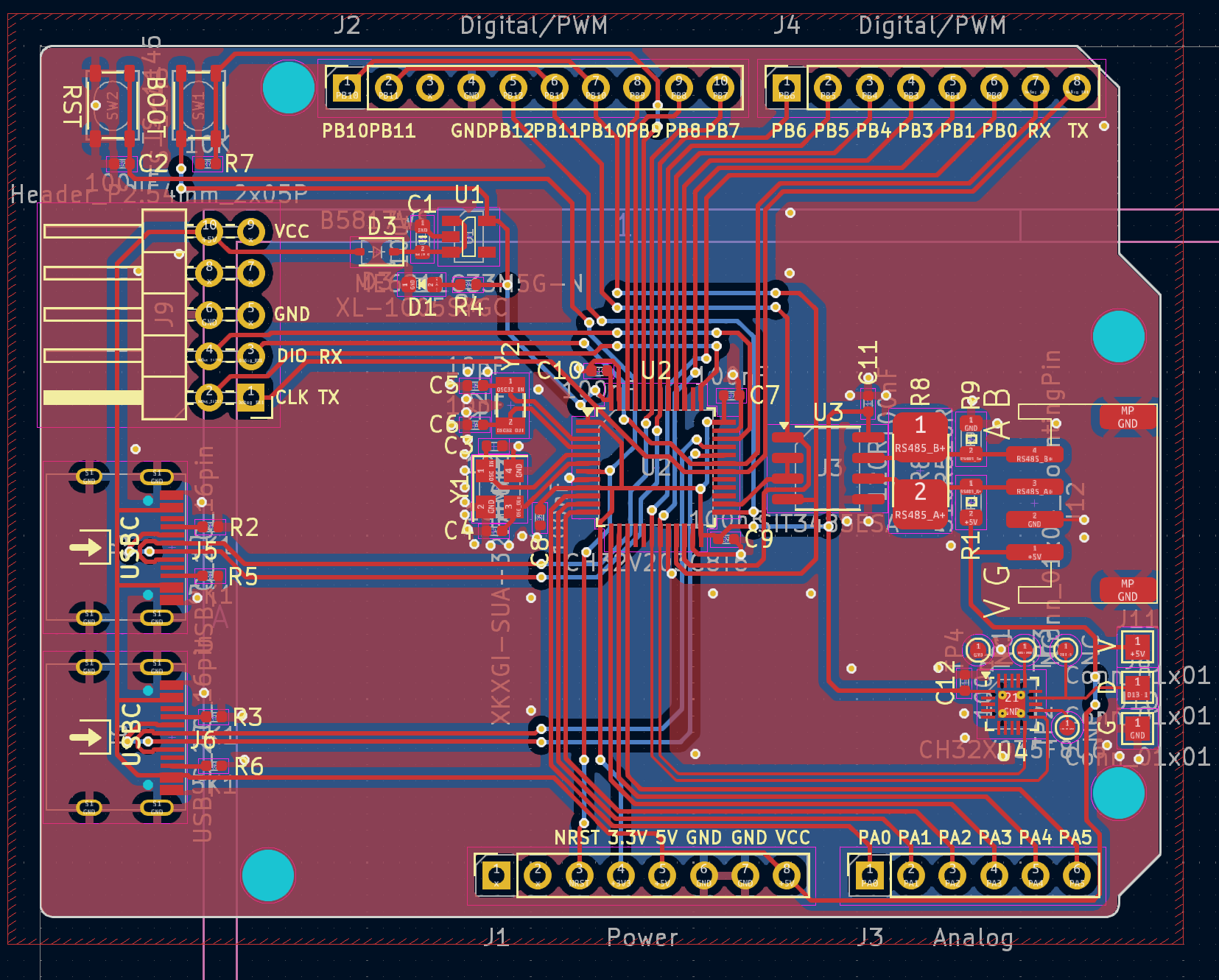
主控制板电路图
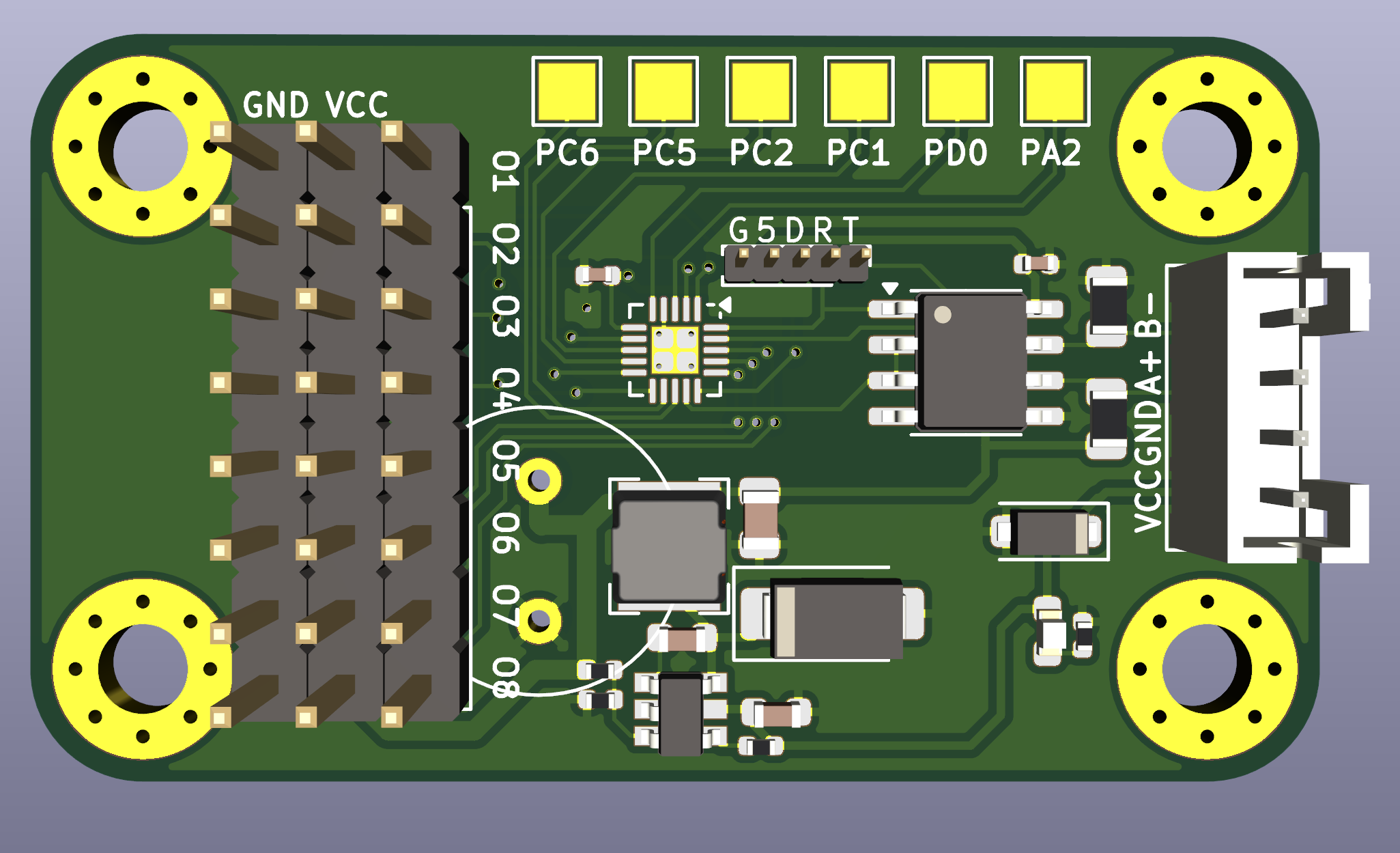
主控制板3D实物图
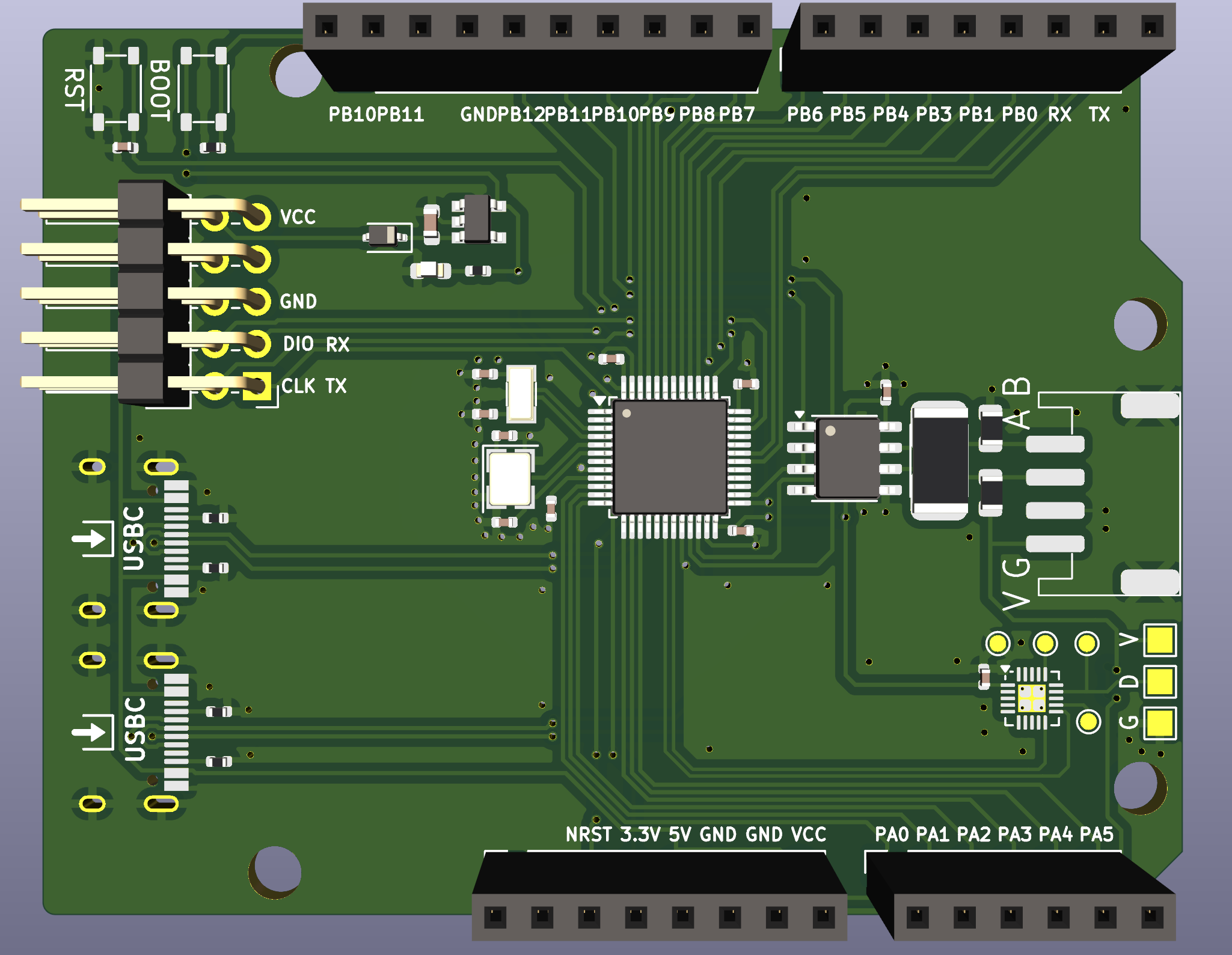
主控制板元件清单
| 位号 | 封装 | 数量 | 参数 |
|---|
| C1 | 603 | 1 | 10uF |
| C10, C11, C12, C2, C7, C8, C9 | 402 | 7 | 100nF |
| C3, C4, C5, C6 | 402 | 4 | 10pF |
| D1 | LED_0603 | 1 | XL-1005SYGC |
| D3 | D_SOD-323 | 1 | B5817WS |
| J1 | PinSocket_1x08_P2.54mm_Vertical | 1 | Power |
| J10, J11, J8 | TestPoint_Pad_1.5x1.5mm | 3 | Conn_01x01 |
| J12 | WAFER-PH2.0-4PWB | 1 | Conn_01x04_MountingPin |
| J2 | PinSocket_1x10_P2.54mm_Vertical | 1 | Digital/PWM |
| J3 | PinSocket_1x06_P2.54mm_Vertical | 1 | Analog |
| J4 | PinSocket_1x08_P2.54mm_Vertical | 1 | Digital/PWM |
| J5, J6 | USB_C_16P_youxin | 2 | USB_C_2.0_16pin |
| J9 | PinHeader_2x05_P2.54mm_Horizontal | 1 | Header_P2.54mm_2x05P |
| R1, R9 | 805 | 2 | 510R |
| R2, R3, R5, R6 | 402 | 4 | 5K1 |
| R4 | 402 | 1 | 2k |
| R7 | 402 | 1 | 10K |
| R8 | 2512 | 1 | 120R |
| SW1, SW2 | SW_Button_XKB_TS-1145_3.2x4.2x2.5 | 2 | TS-1145 |
| TP1, TP2, TP3, TP4 | TestPoint_Pad_D1.0mm | 4 | NC |
| U1 | SOT-23-5 | 1 | ME6211C33M5G-N |
| U2 | LQFP-48_7x7mm_P0.5mm | 1 | CH32V203C8T6 |
| U3 | SOIC-8_3.9x4.9mm_P1.27mm | 1 | SIT3485ESA |
| U4 | QFN-20-1EP_3x3mm_P0.4mm_EP1.65x1.65mm_ThermalVias | 1 | CH32X035F8U6 |
| Y1 | Crystal_SMD_3225-4Pin_3.2x2.5mm | 1 | 8MHz |
| Y2 | Crystal_SMD_3215-2Pin_3.2x1.5mm | 1 | XKXGI-SUA-32.768K |
软件编写
设计思路
1.通讯电路采用485通讯线,协议采用modbus协议
2.舵机为从机,接收主机指令控制舵机
3.主控板为主机,定时接收传感器消息,有触法信号后下发modbus指令
舵机控制板代码
https://gitee.com/baby-sea/servo-control-board.git
主机控制板代码
https://gitee.com/baby-sea/wall-flower-host
 网站备案号:ICP备16046599号-1
网站备案号:ICP备16046599号-1