本教程将会使用UART7口和蓝牙模块制作用单片机发送AT指令并在串口助手上显示接收状况。
1.AT指令及串口介绍
赤菟单片机使用的蓝牙模块是CH9141,通过查询我们得知蓝牙模块和串口7的引脚相连,所以我们选择UART7串口来进行实验。如果选择其他串口是很麻烦的,因为需要通过飞线或者其他方式把从UART7口发送的数据转接出去,并且这样做的意义不是很大。
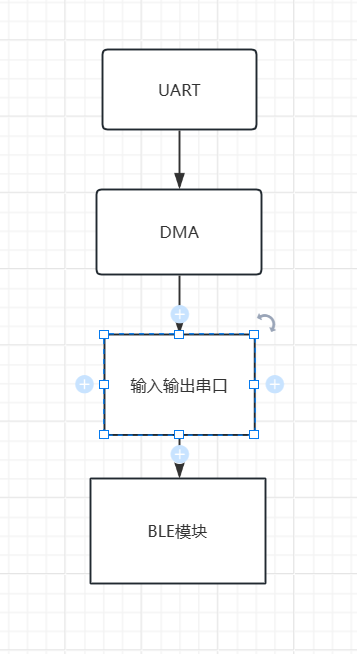
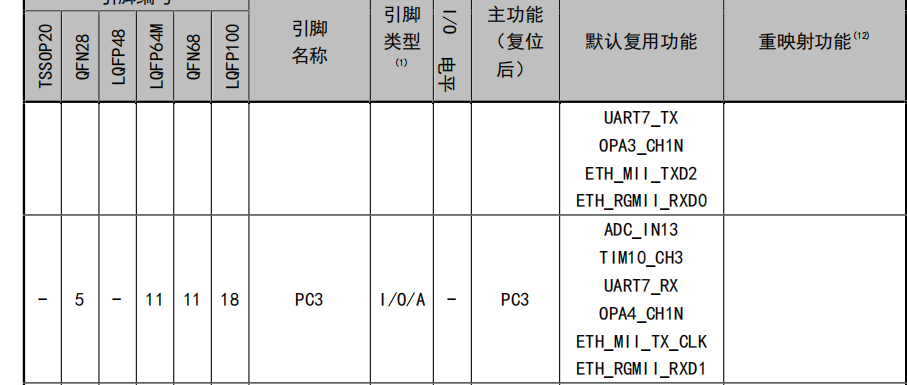
我们在数据手册里找到UART7的引脚口。PC2是UART7的TX引脚,PC3是UART7的RX引脚。在代码里初始化这两个引脚,并将它们使能后用DMA接收信息。
这儿有个流程图表示了信息的传输过程。
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART7, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* USART7 TX-->C2 RX-->C3 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //RX,输入上拉
GPIO_Init(GPIOC, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200; // 波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 数据位 8
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位 1
USART_InitStructure.USART_Parity = USART_Parity_No; // 无校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //使能 RX 和 TX
USART_Init(UART7, &USART_InitStructure);
DMA_Cmd(DMA2_Channel9, ENABLE); //开启接收 DMA
USART_Cmd(UART7, ENABLE); //开启UART
}
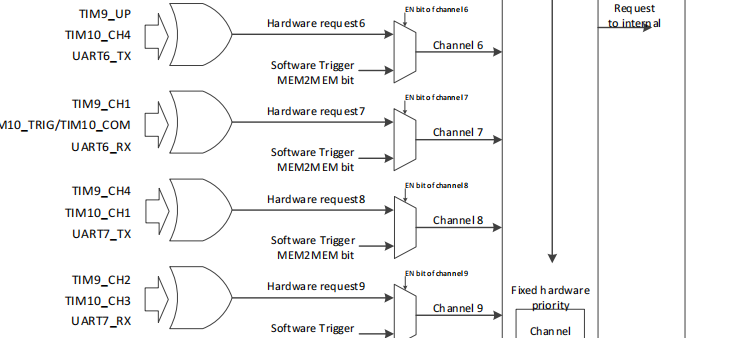
然后在初始化DMA,用DMA来存储数据。DMA2中的channel8和9是UART7口的传输通道。
void DMA_INIT(void)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA2, ENABLE);
// TX DMA 初始化
DMA_DeInit(DMA2_Channel8);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)(&UART7->DATAR); // DMA 外设基址,需指向对应的外设
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)TxBuffer; // DMA 内存基址,指向发送缓冲区的首地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; // 方向 : 外设 作为 终点,即 内存 -> 外设
DMA_InitStructure.DMA_BufferSize = 0; // 缓冲区大小,即要DMA发送的数据长度,目前没有数据可发
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 外设地址自增,禁用
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; // 内存地址自增,启用
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; // 外设数据位宽,8位(Byte)
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; // 内存数据位宽,8位(Byte)
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; // 普通模式,发完结束,不循环发送
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh; // 优先级最高
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; // M2P,禁用M2M
DMA_Init(DMA2_Channel8, &DMA_InitStructure);
// RX DMA 初始化,环形缓冲区自动接收
DMA_DeInit(DMA2_Channel9);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)(&UART7->DATAR);
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)RxBuffer; // 接收缓冲区
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; // 方向 : 外设 作为 源,即 内存 <- 外设
DMA_InitStructure.DMA_BufferSize = RXBUF_SIZE; // 缓冲区长度为 RXBUF_SIZE
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; // 循环模式,构成环形缓冲区
DMA_Init(DMA2_Channel9, &DMA_InitStructure);
}
然后配置蓝牙模块的AT引脚和sleep引脚,可以使蓝牙模块在没接收到指令时以低功耗运行,而在接收到指令后通过AT引脚接收到指令并作出反应。
void GPIO_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// CH9141 配置引脚初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* BLE_sleep --> C13 BLE_AT-->A7 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
然后我们设置标志来判断是否接收到了AT指令。如果没收到,则重置DMA并返回信息。
FlagStatus uartWriteBLE(char * data , uint16_t num)
{
//如上次发送未完成,返回
if(DMA_GetCurrDataCounter(DMA2_Channel8) != 0){
return RESET;
}
DMA_ClearFlag(DMA2_FLAG_TC8);
DMA_Cmd(DMA2_Channel8, DISABLE ); // 关 DMA 后操作
DMA2_Channel8->MADDR = (uint32_t)data; // 发送缓冲区为 data
DMA_SetCurrDataCounter(DMA2_Channel8,num); // 设置缓冲区长度
DMA_Cmd(DMA2_Channel8, ENABLE); // 开 DMA
return SET;
FlagStatus uartWriteBLEstr(char * str)
{
uint16_t num = 0;
while(str[num])num++; // 计算字符串长度
return uartWriteBLE(str,num);
}
}
之后就接收指令并且返回可读的数据。
uint16_t rxBufferReadPos = 0; //接收缓冲区读指针
uint32_t uartReadBLE(char * buffer , uint16_t num)
{
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9); //计算 DMA 数据尾的位置
uint16_t i = 0;
if (rxBufferReadPos == rxBufferEnd){
// 无数据,返回
return 0;
}
while (rxBufferReadPos!=rxBufferEnd && i < num){
buffer[i] = RxBuffer[rxBufferReadPos];
i++;
rxBufferReadPos++;
if(rxBufferReadPos >= RXBUF_SIZE){
// 超出缓冲区,回零
rxBufferReadPos = 0;
}
}
return i;
}
uint16_t uartAvailableBLE()
{
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9);//计算 DMA 数据尾的位置
// 计算可读字节
if (rxBufferReadPos <= rxBufferEnd){
return rxBufferEnd - rxBufferReadPos;
}else{
return rxBufferEnd +RXBUF_SIZE -rxBufferReadPos;
}
}
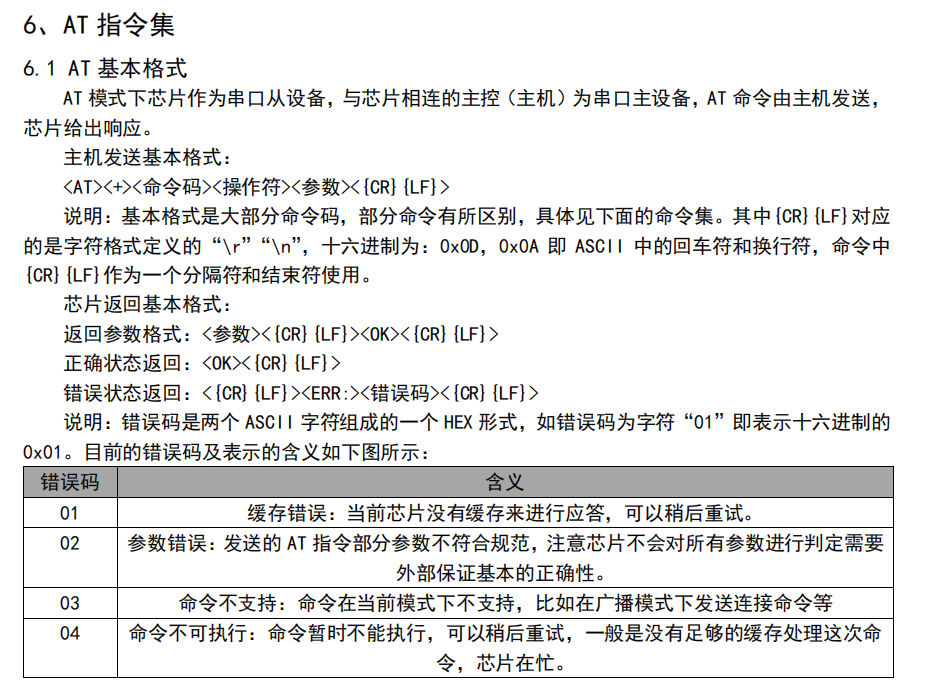
之后编写main函数,在里面初始化UART并且让蓝牙进入AT模式,然后在main函数里写好AT指令。之后就可以在串口助手里看到接收到的结果了。下图是一些AT指令格式以及部分指令集。

完整代码
/*******************************************************************************
* CH9141 BLE 串口透传例程
* 赤菟开发板上 UART7 CH9141 串口透传模块
* 本例程演示使用 DMA 通过 UART7 与 CH9141 通信
*
* 也可以用手机或电脑连接 CH9141 进行通信。
*
* 用手机端连接时,需要通过蓝牙调试软件与CH9141通信
* 注意 CH9141 透传服务的 UUID 为 0000fff0,其中 CH9141的 TX 为 0000fff1,RX 为 0000fff2
* 配置不正确可以连接但不能通信
*
* 例程中 uartWriteBLE(), uartWriteBLEstr() 是非阻塞的。
* 调用这些函数发送时,若上一次发送尚未完成,将不等待而直接返回
*
* 安卓平台调试 APP
* BLEAssist 沁恒官方的 BLE 调试 APP,配置比较详细,适合复杂调试 http://www.wch.cn/downloads/BLEAssist_ZIP.html
* 蓝牙调试器 XLazyDog 开发,适合简单调试、遥控调试 https://blog.csdn.net/XLazyDog/article/details/99584735
*******************************************************************************/
#include "debug.h"
/* Global define */
#define RXBUF_SIZE 1024 // DMA buffer size
#define size(a) (sizeof(a) / sizeof(*(a)))
/* Global Variable */
u8 TxBuffer[] = " ";
u8 RxBuffer[RXBUF_SIZE]={0};
/*******************************************************************************
* Function Name : USARTx_CFG
* Description : Initializes the USART peripheral.
* 描述 : 串口初始化
* Input : None
* Return : None
*******************************************************************************/
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART7, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* USART7 TX-->C2 RX-->C3 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //RX,输入上拉
GPIO_Init(GPIOC, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200; // 波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 数据位 8
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位 1
USART_InitStructure.USART_Parity = USART_Parity_No; // 无校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //使能 RX 和 TX
USART_Init(UART7, &USART_InitStructure);
DMA_Cmd(DMA2_Channel9, ENABLE); //开启接收 DMA
USART_Cmd(UART7, ENABLE); //开启UART
}
/*******************************************************************************
* Function Name : DMA_INIT
* Description : Configures the DMA.
* 描述 : DMA 初始化
* Input : None
* Return : None
*******************************************************************************/
void DMA_INIT(void)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA2, ENABLE);
// TX DMA 初始化
DMA_DeInit(DMA2_Channel8);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)(&UART7->DATAR); // DMA 外设基址,需指向对应的外设
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)TxBuffer; // DMA 内存基址,指向发送缓冲区的首地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; // 方向 : 外设 作为 终点,即 内存 -> 外设
DMA_InitStructure.DMA_BufferSize = 0; // 缓冲区大小,即要DMA发送的数据长度,目前没有数据可发
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 外设地址自增,禁用
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; // 内存地址自增,启用
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; // 外设数据位宽,8位(Byte)
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; // 内存数据位宽,8位(Byte)
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; // 普通模式,发完结束,不循环发送
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh; // 优先级最高
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; // M2P,禁用M2M
DMA_Init(DMA2_Channel8, &DMA_InitStructure);
// RX DMA 初始化,环形缓冲区自动接收
DMA_DeInit(DMA2_Channel9);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)(&UART7->DATAR);
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)RxBuffer; // 接收缓冲区
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; // 方向 : 外设 作为 源,即 内存 <- 外设
DMA_InitStructure.DMA_BufferSize = RXBUF_SIZE; // 缓冲区长度为 RXBUF_SIZE
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; // 循环模式,构成环形缓冲区
DMA_Init(DMA2_Channel9, &DMA_InitStructure);
}
/*******************************************************************************
* Function Name : GPIO_CFG
* Description : Initializes GPIOs.
* 描述 : GPIO 初始化
* Input : None
* Return : None
*******************************************************************************/
void GPIO_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// CH9141 配置引脚初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* BLE_sleep --> C13 BLE_AT-->A7 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/*******************************************************************************
* Function Name : uartWriteBLE
* Description : send data to BLE via UART7 向蓝牙模组发送数据
* Input : char * data data to send 要发送的数据的首地址
* uint16_t num number of data 数据长度
* Return : RESET UART7 busy,failed to send 发送失败
* SET send success 发送成功
*******************************************************************************/
FlagStatus uartWriteBLE(char * data , uint16_t num)
{
//如上次发送未完成,返回
if(DMA_GetCurrDataCounter(DMA2_Channel8) != 0){
return RESET;
}
DMA_ClearFlag(DMA2_FLAG_TC8);
DMA_Cmd(DMA2_Channel8, DISABLE ); // 关 DMA 后操作
DMA2_Channel8->MADDR = (uint32_t)data; // 发送缓冲区为 data
DMA_SetCurrDataCounter(DMA2_Channel8,num); // 设置缓冲区长度
DMA_Cmd(DMA2_Channel8, ENABLE); // 开 DMA
return SET;
}
/*******************************************************************************
* Function Name : uartWriteBLEstr
* Description : send string to BLE via UART7 向蓝牙模组发送字符串
* Input : char * str string to send
* Return : RESET UART7 busy,failed to send 发送失败
* SET send success 发送成功
*******************************************************************************/
FlagStatus uartWriteBLEstr(char * str)
{
uint16_t num = 0;
while(str[num])num++; // 计算字符串长度
return uartWriteBLE(str,num);
}
/*******************************************************************************
* Function Name : uartReadBLE
* Description : read some bytes from receive buffer 从接收缓冲区读出一组数据
* Input : char * buffer buffer to storage the data 用来存放读出数据的地址
* uint16_t num number of data to read 要读的字节数
* Return : int number of bytes read 返回实际读出的字节数
*******************************************************************************/
uint16_t rxBufferReadPos = 0; //接收缓冲区读指针
uint32_t uartReadBLE(char * buffer , uint16_t num)
{
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9); //计算 DMA 数据尾的位置
uint16_t i = 0;
if (rxBufferReadPos == rxBufferEnd){
// 无数据,返回
return 0;
}
while (rxBufferReadPos!=rxBufferEnd && i < num){
buffer[i] = RxBuffer[rxBufferReadPos];
i++;
rxBufferReadPos++;
if(rxBufferReadPos >= RXBUF_SIZE){
// 超出缓冲区,回零
rxBufferReadPos = 0;
}
}
return i;
}
/*******************************************************************************
* Function Name : uartReadByteBLE
* Description : read one byte from UART buffer 从接收缓冲区读出 1 字节数据
* Input : None
* Return : char read data 返回读出的数据(无数据也返回0)
*******************************************************************************/
char uartReadByteBLE()
{
char ret;
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9);//计算 DMA 数据尾的位置
if (rxBufferReadPos == rxBufferEnd){
// 无数据,返回
return 0;
}
ret = RxBuffer[rxBufferReadPos];
rxBufferReadPos++;
if(rxBufferReadPos >= RXBUF_SIZE){
// 超出缓冲区,回零
rxBufferReadPos = 0;
}
return ret;
}
/*******************************************************************************
* Function Name : uartAvailableBLE
* Description : get number of bytes Available to read from the UART buffer 获取缓冲区中可读数据的数量
* Input : None
* Return : uint16_t number of bytes Available to readd 返回可读数据数量
*******************************************************************************/
uint16_t uartAvailableBLE()
{
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9);//计算 DMA 数据尾的位置
// 计算可读字节
if (rxBufferReadPos <= rxBufferEnd){
return rxBufferEnd - rxBufferReadPos;
}else{
return rxBufferEnd +RXBUF_SIZE -rxBufferReadPos;
}
}
/*******************************************************************************
* Function Name : main
* Description : Main program.
* Input : None
* Return : None
*******************************************************************************/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d\r\n",SystemCoreClock);
DMA_INIT();
USARTx_CFG(); /* USART INIT */
USART_DMACmd(UART7,USART_DMAReq_Tx|USART_DMAReq_Rx,ENABLE);
GPIO_CFG();
GPIO_WriteBit(GPIOA, GPIO_Pin_7,RESET); //进入 AT
GPIO_WriteBit(GPIOC, GPIO_Pin_13,SET); //enable CH9141
Delay_Ms(1000);
while(1){
//串口空闲 0.5s 后发送 "AT...\r\n" 可以直接进入 AT 模式
//uartWriteBLEstr("AT...\r\n");
// AT 指令间需有一定间隔
Delay_Ms(100);
while(uartWriteBLEstr("AT+TPL?\r\n")==RESET);
Delay_Ms(100);
while(uartWriteBLEstr("AT+BLESTA?\r\n")==RESET);
Delay_Ms(100);
while(uartWriteBLEstr("AT+BLEMODE?\r\n")==RESET);
Delay_Ms(100);
while(uartWriteBLEstr("AT+CONNINTER?\r\n")==RESET);
int num = uartAvailableBLE();
if (num > 0 ){
char buffer[1024]={"\0"};
printf("AT+TPL?\r\n");
printf("AT+BLESTA?\r\n");
printf("AT+BLEMODE?\r\n");
uartReadBLE(buffer , num);
printf("Revceived:%s\r\n",buffer);
}
GPIO_WriteBit(GPIOA, GPIO_Pin_7,SET); // 退出AT。可用手机或电脑连接CH9141,测试数据收发
}
}
实验结果
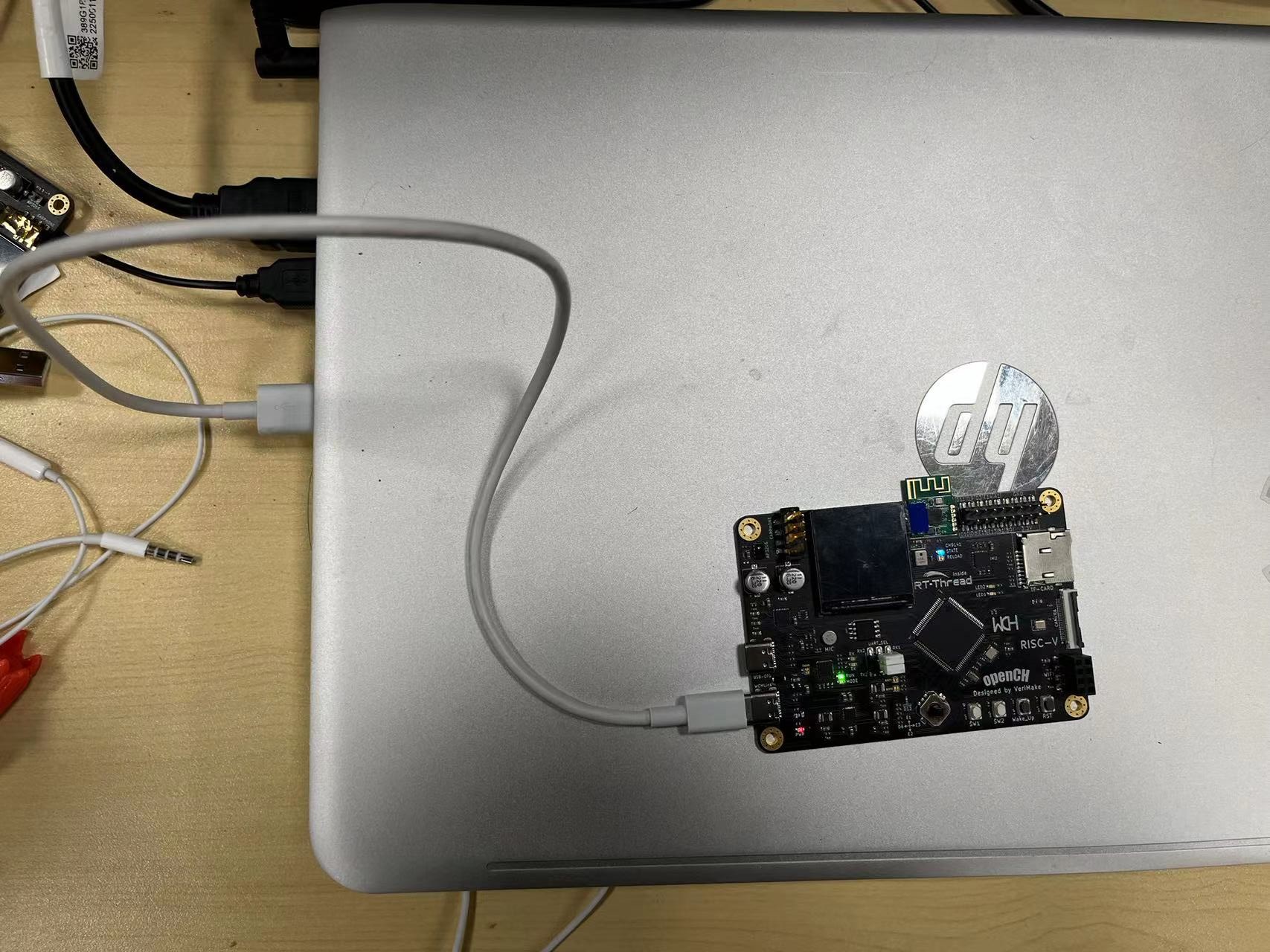
将电脑的USB接口和单片机的WCHLink接口通过USB线连接在一起,如下图所示。
这是在串口看到的数据。

 网站备案号:ICP备16046599号-1
网站备案号:ICP备16046599号-1