前言
是基于
微信公众号:可动结构实验室---【文献荐读】软体折纸爬行机器人
获取灵感进行改造
相关论文:Soft robotic origami crawler
原作的应用场景设想是医疗领域,可以做内窥镜检查或者定点药物释放,所以它的体积非常小,主要通过磁力与摩擦来运作。
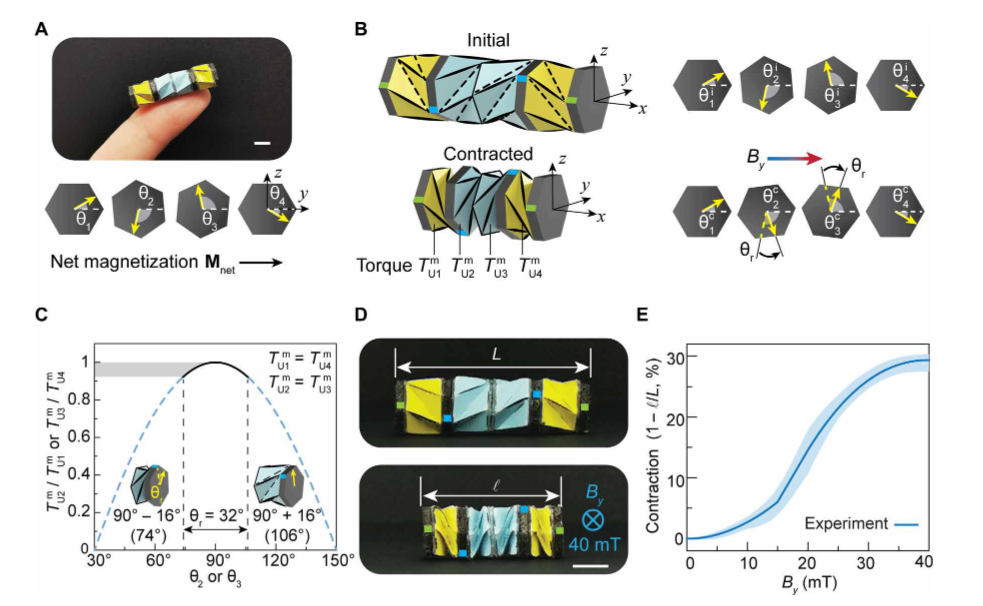
这个对于我们来说有点难以实现。将他整体放大,依旧是靠自身蠕动,但是应用场景可以放在管道的检查,也可以再进一步优化做管道疏通。
方案设计

通过一个循环(六个步骤)可以实现机器往上移动一小段距离。
设0代表拉升收缩,1代表压缩膨胀,3个数字从左到右为机器从头到尾三节
六个步骤依次为:100、110、111、011、001、101
根据上述步骤得出一个循环前进的距离取决于中间节的伸缩差值。
将首位改为三爪设计,中间改为可伸长收缩的结构,使前进效率更优。

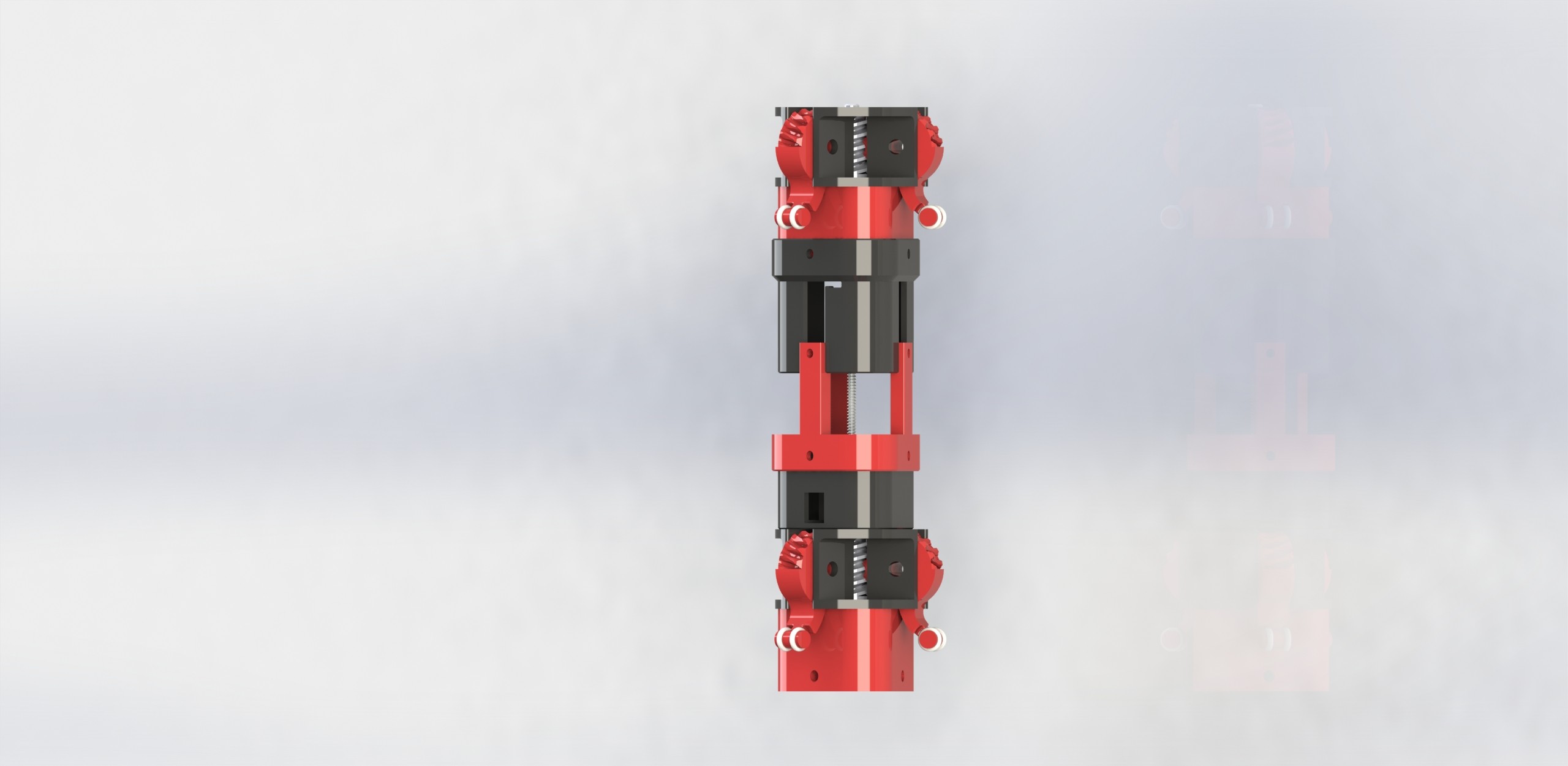
机器人包含两个固定节与一个伸缩节。固定节采用的是蜗轮蜗杆设计,其与减速电机相结合有自锁的特性。伸缩节使用的是丝杆电机与螺母,类似螺丝拧螺母。
管道机器人模型文件:
(https://pan.baidu.com/s/1n2VSjmxW9nW7ScBg2auG5w?pwd=m3tq)
提取码:m3tq
 网站备案号:ICP备16046599号-1
网站备案号:ICP备16046599号-1