赤兔板CH32V307蓝牙模块教程(上)
前言
说是教程,其实算个人的学习笔记,这其中也涉及到和赤菟板上的LCD屏幕的互动。在学习这个蓝牙模块的途中也遇到不少问题,也难怪论坛上不少人都在问相关问题。老规矩,没接触过赤菟板的可以移步论坛的赤菟教程目录。本次的教程将分为上中下三篇说明蓝牙模块的使用。
前置资料与工具
这部分的资料和工具基本上都可以在沁恒的官网上找到(当然本文的最后也会贴):传送门
1.虚拟串口管理器
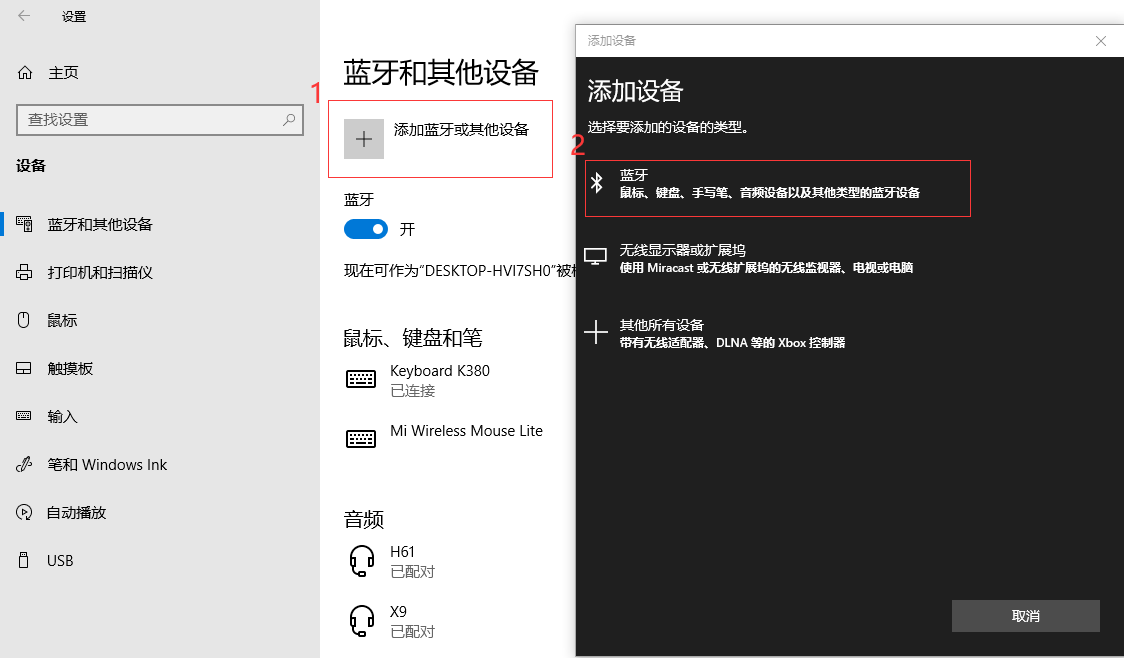
相信很多同学都被卡在这里了,明明已经搜到蓝牙,也连接上了,为什么在设备管理器的端口(COM和LPT)中根本找不到蓝牙串口,他并没有产生新的蓝牙串口。这好像是因为Windows更新的时候把这个更新掉了,所以我们需要用虚拟串口,即进入沁恒官网(上方已贴出)下载下图所示的BLEComWin.ZIP。

装好压缩包里面的软件之后直接打开,如下图步骤创建蓝牙虚拟串口。(注意断开你之前在电脑蓝牙设置里面的蓝牙连接,同时只能与一个设备建立连接)
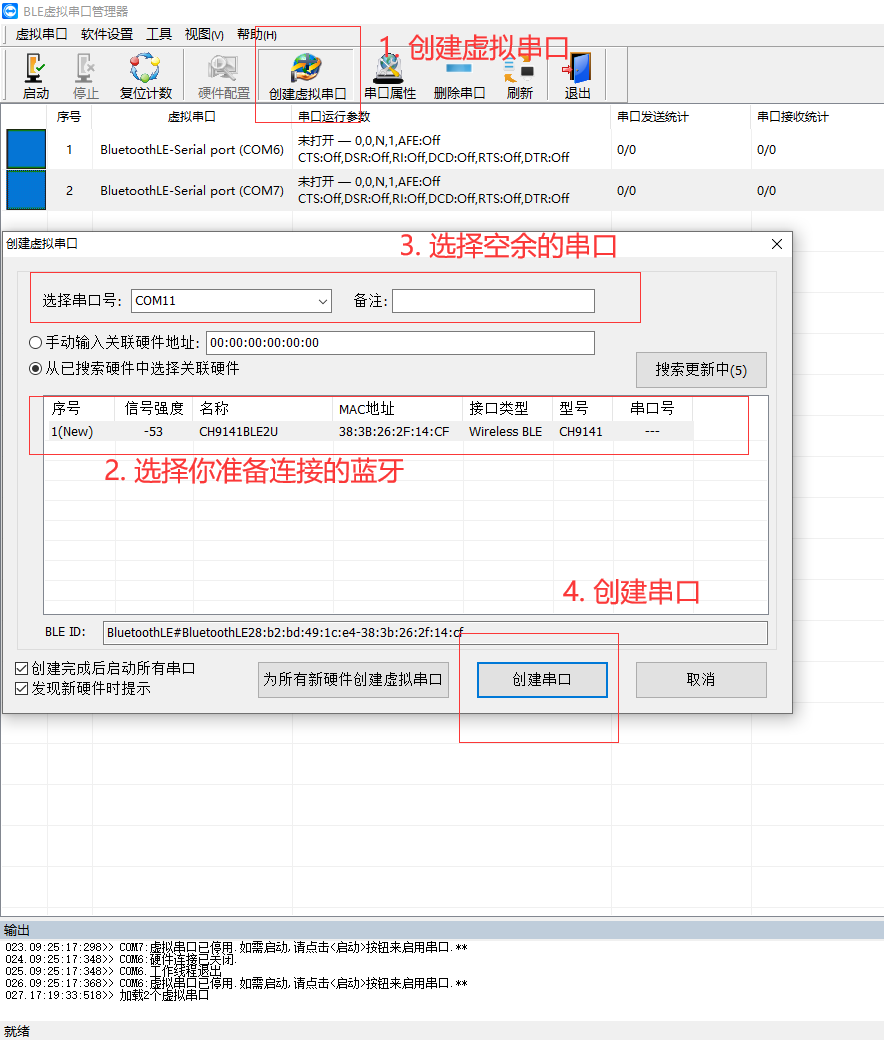
创建好虚拟串口后,如果板子没有和其他设备连接的话会自动连接,左上角的启动和停止是用来切断与板子的蓝牙连接的,之后的主从机连接时会用到的。
2.WCH蓝牙调试助手
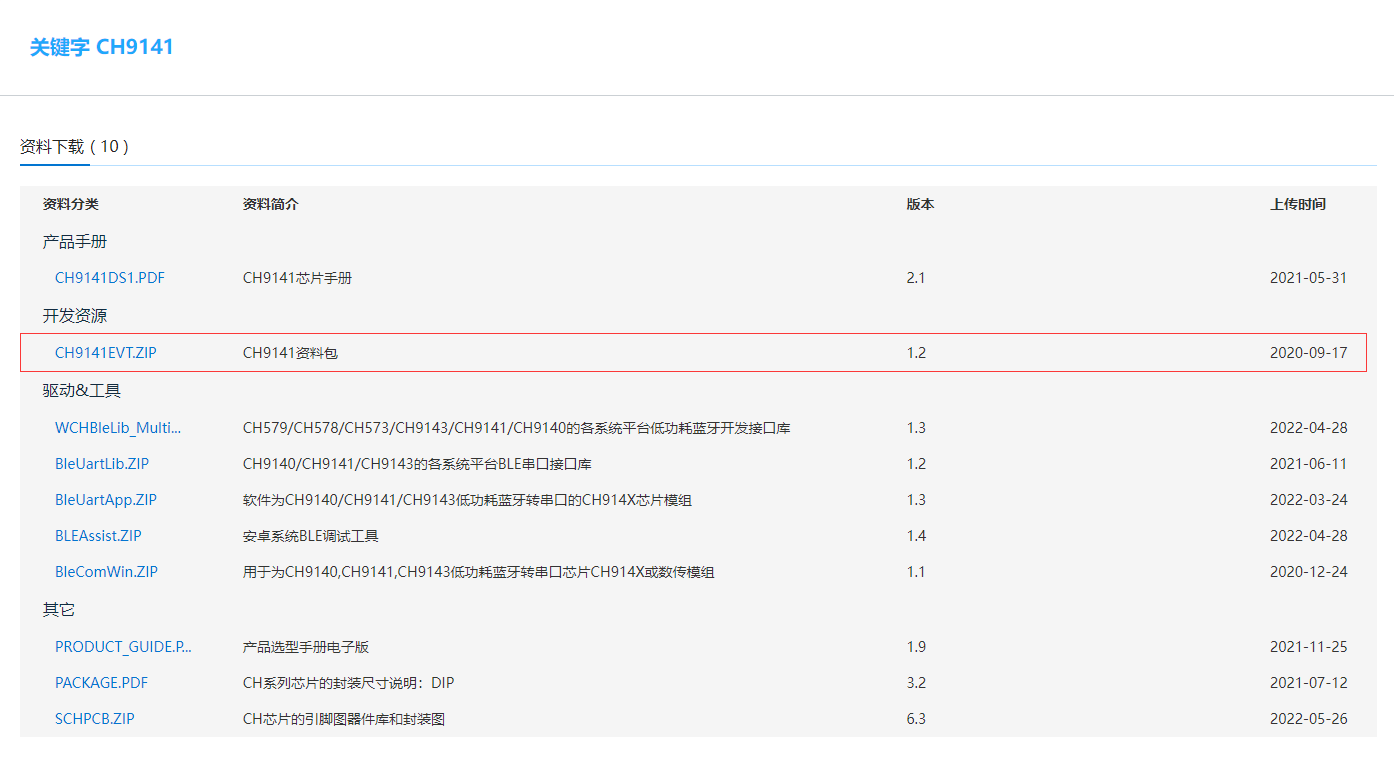
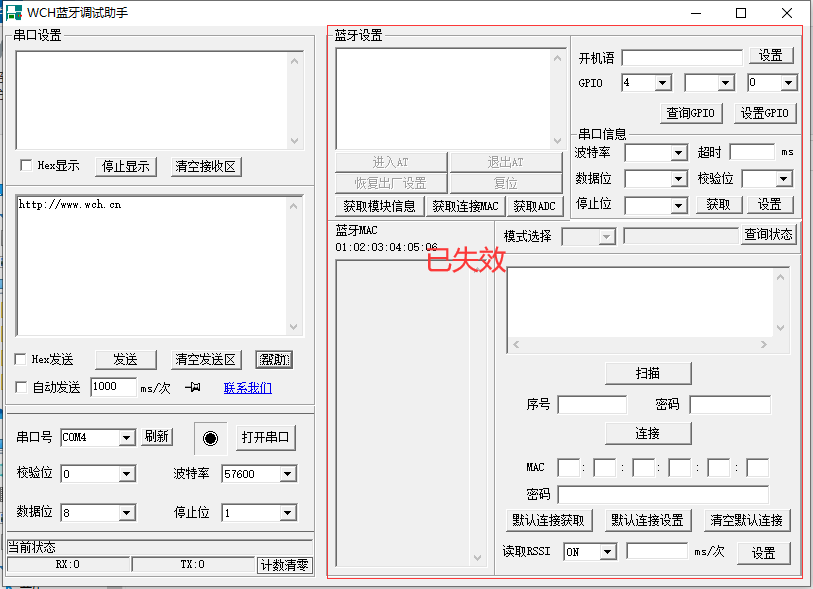
这个压缩包里面CH9141EVT使用说明和TOOLS里面的WCH蓝牙调试助手是需要用到的,但是使用说明里面和AT指令相关的内容已经完全失效,已经汇报给了沁恒官方。这个蓝牙调试助手仅可通过蓝牙串口发送数据,通过WCHLink串口接收数据,而通过WCHLink串口向蓝牙串口发送的数据好像板子就接收不到,其他的串口助手(这里沿用论坛CH549资料包里面带的串口助手)可正常收发数据。这里可能也是部分同学碰到问题的原因。(波特率记得调为115200,下图未调仍处于默认状态)
3.CH9141数据手册
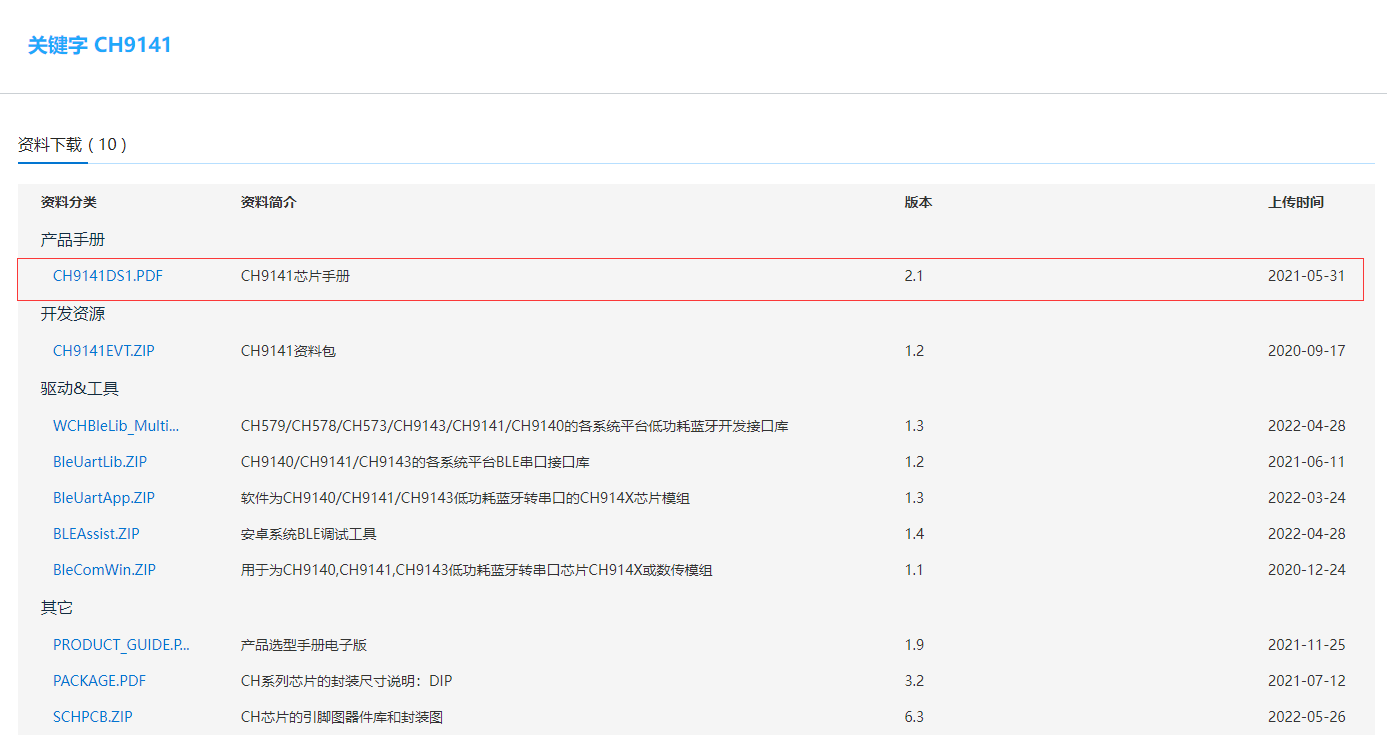
由数据手册可以知道CH9141是一款蓝牙串口透传芯片,芯片支持广播模式、主机模式和从机模式,支持蓝牙BLE4.2。支持串口AT配置和在从机模式下的蓝牙通信配置,支持MODEM联络信号,并提供通用GPIO、同步GPIO、ADC采集功能,串口波特率最高1Mbps。蓝牙从机模式下可设置蓝牙名称、厂商信息等参数,可通过APP或者串口命令轻松配置,方便快捷。
4.手机端蓝牙调试器

用手机端连接时,需要通过蓝牙调试软件与CH9141通信注意CH9141透传服务的UUID为0000fff0,其中CH9141的TX为0000fff1,RX为0000fff2。配置不正确可以连接但不能通信。
上图这个app可以在应用市场下载到,注意版本,如果无上图设置参数的齿轮图标,请更新到最新版,相关博客:传送门。
当然也可以用沁恒官方的BLE调试APP,配置比较详细,适合复杂调试:传送门
准备程序
这部分即主程序的各个组成部分,分别驱动各个模块。
1.LCD屏幕显示
LCD.h
#ifndef __LCD_H
#define __LCD_H
#include"debug.h"
#include"stdlib.h"
#define LCD_CMD ((u32)0x6001FFFF)
#define LCD_DATA ((u32)0x60020000)
/* PWM Output Mode Definition */
#define PWM_MODE1 0
#define PWM_MODE2 1
/* PWM Output Mode Selection */
#define PWM_MODE PWM_MODE1
//#define PWM_MODE PWM_MODE2
#define delay_ms(x) Delay_Ms(x)
#define delay_us(x) Delay_Us(x)
#define LCD_W 240
#define LCD_H 240
//POINT_COLOR
#define WHITE 0xFFFF
#define BLACK 0x0000
#define BLUE 0x001F
#define BRED 0XF81F
#define GRED 0XFFE0
#define GBLUE 0X07FF
#define RED 0xF800
#define MAGENTA 0xF81F
#define GREEN 0x07E0
#define CYAN 0x7FFF
#define YELLOW 0xFFE0
#define BROWN 0XBC40
#define BRRED 0XFC07
#define GRAY 0X8430
#define GRAY175 0XAD75
#define GRAY151 0X94B2
#define GRAY187 0XBDD7
#define GRAY240 0XF79E
#define LGRAY 0XC618
void lcd_clear(u16 color);
void lcd_address_set(u16 x1, u16 y1, u16 x2, u16 y2);
void lcd_set_color(u16 back, u16 fore);
void lcd_draw_point(u16 x, u16 y);
void lcd_draw_point_color(u16 x, u16 y, u16 color);
void lcd_draw_circle(u16 x0, u16 y0, u8 r);
void lcd_draw_line(u16 x1, u16 y1, u16 x2, u16 y2);
void lcd_draw_rectangle(u16 x1, u16 y1, u16 x2, u16 y2);
void lcd_fill(u16 x_start, u16 y_start, u16 x_end, u16 y_end, u16 color);
void lcd_show_num(u16 x, u16 y, u32 num, u8 len, u32 size);
void lcd_show_string(u16 x, u16 y, u32 size, const char *fmt, ...);
void lcd_show_image(u16 x, u16 y, u16 length, u16 wide, const u8 *p);
void lcd_init(void);
void LCD_SetBrightness(u8 brightness);
void lcd_enter_sleep(void);
void lcd_exit_sleep(void);
void lcd_display_on(void);
void lcd_display_off(void);
#endif
该.h文件为LCD屏幕显示的头文件,定义了屏幕各个参数,具体函数看.c文件。
LCD.c
#include "lcd.h"
#include "stdlib.h"
#include "font.h"
#include "stdarg.h"
#define LCD_CLEAR_SEND_NUMBER 5760
u16 BACK_COLOR = BLACK, FORE_COLOR = WHITE;
void lcd_write_cmd(const u8 cmd)
{
*(__IO u8*)LCD_CMD=cmd;
}
void lcd_write_data(const u8 data)
{
*(__IO u8*)LCD_DATA=data;
}
void lcd_write_half_word(const u16 da)
{
*(__IO u8*)LCD_DATA=(u8)(da>>8);
*(__IO u8*)LCD_DATA=(u8)da;
}
u8 lcd_read_data(void)
{
vu8 ram;
ram = *(__IO u8*)LCD_DATA;
return ram;
}
u8 lcd_read_reg(const u8 reg)
{
lcd_write_cmd(reg);
delay_us(5);
return lcd_read_data();
}
void lcd_fsmc_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure={0};
FSMC_NORSRAMInitTypeDef FSMC_NORSRAMInitStructure={0};
FSMC_NORSRAMTimingInitTypeDef readWriteTiming={0};
FSMC_NORSRAMTimingInitTypeDef writeTiming={0};
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOD|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/* RS--D12 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/* CS: PD7*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_ResetBits(GPIOD,GPIO_Pin_7);
readWriteTiming.FSMC_AddressSetupTime = 0x01;
readWriteTiming.FSMC_AddressHoldTime = 0x00;
readWriteTiming.FSMC_DataSetupTime = 0x0f;
readWriteTiming.FSMC_BusTurnAroundDuration = 0x00;
readWriteTiming.FSMC_CLKDivision = 0x00;
readWriteTiming.FSMC_DataLatency = 0x00;
readWriteTiming.FSMC_AccessMode = FSMC_AccessMode_A;
writeTiming.FSMC_AddressSetupTime = 0x00;
writeTiming.FSMC_AddressHoldTime = 0x00;
writeTiming.FSMC_DataSetupTime = 0x03;
writeTiming.FSMC_BusTurnAroundDuration = 0x00;
writeTiming.FSMC_CLKDivision = 0x00;
writeTiming.FSMC_DataLatency = 0x00;
writeTiming.FSMC_AccessMode = FSMC_AccessMode_A;
FSMC_NORSRAMInitStructure.FSMC_Bank = FSMC_Bank1_NORSRAM1;
FSMC_NORSRAMInitStructure.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable;
FSMC_NORSRAMInitStructure.FSMC_MemoryType =FSMC_MemoryType_SRAM;
FSMC_NORSRAMInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_8b;
FSMC_NORSRAMInitStructure.FSMC_BurstAccessMode =FSMC_BurstAccessMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;
FSMC_NORSRAMInitStructure.FSMC_AsynchronousWait=FSMC_AsynchronousWait_Disable;
FSMC_NORSRAMInitStructure.FSMC_WrapMode = FSMC_WrapMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;
FSMC_NORSRAMInitStructure.FSMC_WriteOperation = FSMC_WriteOperation_Enable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignal = FSMC_WaitSignal_Disable;
FSMC_NORSRAMInitStructure.FSMC_ExtendedMode = FSMC_ExtendedMode_Enable;
FSMC_NORSRAMInitStructure.FSMC_WriteBurst = FSMC_WriteBurst_Disable;
FSMC_NORSRAMInitStructure.FSMC_ReadWriteTimingStruct = &readWriteTiming;
FSMC_NORSRAMInitStructure.FSMC_WriteTimingStruct = &writeTiming;
FSMC_NORSRAMInit(&FSMC_NORSRAMInitStructure);
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM1, ENABLE);
}
/*******************************************************************************
* Function Name : TIM1_PWMOut_Init
* Description : Initializes TIM1 PWM output.
* Input : arr: the period value.
* psc: the prescaler value.
* ccp: the pulse value.
* Return : None
*******************************************************************************/
void TIM1_PWMOut_Init( u16 arr, u16 psc, u16 ccp )
{
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit( TIM1, &TIM_TimeBaseInitStructure );
#if (PWM_MODE == PWM_MODE1)
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
#elif (PWM_MODE == PWM_MODE2)
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
#endif
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_Pulse = ccp;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OC2Init( TIM1, &TIM_OCInitStructure );
TIM_CtrlPWMOutputs( TIM1, ENABLE );
TIM_OC2PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_ARRPreloadConfig( TIM1, ENABLE );
TIM_Cmd( TIM1, ENABLE );
}
void lcd_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_TIM1, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//wait at least 100ms for reset
delay_ms(100);
TIM1_PWMOut_Init( 100, 144-1, 50 );
}
void LCD_SetBrightness(u8 brightness)
{
if (brightness > 100) brightness = 100;
TIM_SetCompare2( TIM1, brightness );
}
void lcd_init(void)
{
u16 id=0;
lcd_gpio_init();
lcd_fsmc_init();
lcd_write_cmd(0X04);
id = lcd_read_data(); //dummy read
id = lcd_read_data(); //读到0X85
id = lcd_read_data(); //读取0X85
id <<= 8;
id |= lcd_read_data(); //读取0X52
printf("id = %x\r\n",id);
delay_ms(50);
/* Memory Data Access Control */
lcd_write_cmd(0x36);
lcd_write_data(0x00);
/* RGB 5-6-5-bit */
lcd_write_cmd(0x3A);
lcd_write_data(0x05);
/* Porch Setting */
lcd_write_cmd(0xB2);
lcd_write_data(0x0C);
lcd_write_data(0x0C);
lcd_write_data(0x00);
lcd_write_data(0x33);
lcd_write_data(0x33);
/* Gate Control */
lcd_write_cmd(0xB7);
lcd_write_data(0x00);
/* VCOM Setting */
lcd_write_cmd(0xBB);
lcd_write_data(0x3F);
/* LCM Control */
lcd_write_cmd(0xC0);
lcd_write_data(0x2C);
/* VDV and VRH Command Enable */
lcd_write_cmd(0xC2);
lcd_write_data(0x01);
/* VRH Set */
lcd_write_cmd(0xC3);
lcd_write_data(0x0D);
/* VDV Set */
lcd_write_cmd(0xC4);
lcd_write_data(0x20);
/* Frame Rate Control in Normal Mode */
lcd_write_cmd(0xC6);
lcd_write_data(0x03); //60Hz-0x0F 82Hz-0x07 99Hz-0x03
/* Power Control 1 */
lcd_write_cmd(0xD0);
lcd_write_data(0xA4);
lcd_write_data(0xA1);
/* Positive Voltage Gamma Control */
lcd_write_cmd(0xE0);
lcd_write_data(0xF0);
lcd_write_data(0x03);
lcd_write_data(0x09);
lcd_write_data(0x03);
lcd_write_data(0x03);
lcd_write_data(0x10);
lcd_write_data(0x2D);
lcd_write_data(0x43);
lcd_write_data(0x3F);
lcd_write_data(0x33);
lcd_write_data(0x0D);
lcd_write_data(0x0E);
lcd_write_data(0x29);
lcd_write_data(0x32);
/* Negative Voltage Gamma Control */
lcd_write_cmd(0xE1);
lcd_write_data(0xF0);
lcd_write_data(0x0C);
lcd_write_data(0x10);
lcd_write_data(0x0E);
lcd_write_data(0x0E);
lcd_write_data(0x0A);
lcd_write_data(0x2D);
lcd_write_data(0x33);
lcd_write_data(0x45);
lcd_write_data(0x3A);
lcd_write_data(0x14);
lcd_write_data(0x19);
lcd_write_data(0x31);
lcd_write_data(0x37);
/* Display Inversion On */
lcd_write_cmd(0x21);
/* Sleep Out */
lcd_write_cmd(0x11);
/* wait for power stability */
delay_ms(100);
lcd_clear(BLACK);
/* display on */
GPIO_SetBits(GPIOB,GPIO_Pin_14);
lcd_write_cmd(0x29);
}
/**
* Set background color and foreground color
*
* @param back background color
* @param fore fore color
*
* @return void
*/
void lcd_set_color(u16 back, u16 fore)
{
BACK_COLOR = back;
FORE_COLOR = fore;
}
void lcd_display_on(void)
{
GPIO_SetBits(GPIOB,GPIO_Pin_14);
}
void lcd_display_off(void)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_14);
}
/* lcd enter the minimum power consumption mode and backlight off. */
void lcd_enter_sleep(void)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_14);
delay_ms(5);
lcd_write_cmd(0x10);
}
/* lcd turn off sleep mode and backlight on. */
void lcd_exit_sleep(void)
{
GPIO_SetBits(GPIOB,GPIO_Pin_14);
delay_ms(5);
lcd_write_cmd(0x11);
delay_ms(120);
}
/**
* Set drawing area
*
* @param x1 start of x position
* @param y1 start of y position
* @param x2 end of x position
* @param y2 end of y position
*
* @return void
*/
void lcd_address_set(u16 x1, u16 y1, u16 x2, u16 y2)
{
lcd_write_cmd(0x2a);
lcd_write_data(x1 >> 8);
lcd_write_data(x1);
lcd_write_data(x2 >> 8);
lcd_write_data(x2);
lcd_write_cmd(0x2b);
lcd_write_data(y1 >> 8);
lcd_write_data(y1);
lcd_write_data(y2 >> 8);
lcd_write_data(y2);
lcd_write_cmd(0x2C);
}
/**
* clear the lcd.
*
* @param color Fill color
*
* @return void
*/
void lcd_clear(u16 color)
{
u16 i, j;
u8 data[2] = {0};
data[0] = color >> 8;
data[1] = color;
lcd_address_set(0, 0, LCD_W - 1, LCD_H - 1);
/* 5760 = 240*240/20 */
for (i = 0; i < LCD_W; i++)
{
for (j = 0; j < LCD_H; j++)
{
*(__IO u8*)LCD_DATA=data[0];
*(__IO u8*)LCD_DATA=data[1];
}
}
}
/**
* display a point on the lcd.
*
* @param x x position
* @param y y position
*
* @return void
*/
void lcd_draw_point(u16 x, u16 y)
{
lcd_address_set(x, y, x, y);
lcd_write_half_word(FORE_COLOR);
}
/**
* display a point on the lcd using the given colour.
*
* @param x x position
* @param y y position
* @param color color of point
*
* @return void
*/
void lcd_draw_point_color(u16 x, u16 y, u16 color)
{
lcd_address_set(x, y, x, y);
lcd_write_half_word(color);
}
/**
* full color on the lcd.
*
* @param x_start start of x position
* @param y_start start of y position
* @param x_end end of x position
* @param y_end end of y position
* @param color Fill color
*
* @return void
*/
void lcd_fill(u16 x_start, u16 y_start, u16 x_end, u16 y_end, u16 color)
{
u16 i = 0, j = 0;
u32 size = 0, size_remain = 0;
size = (x_end - x_start) * (y_end - y_start) * 2;
if (size > LCD_CLEAR_SEND_NUMBER)
{
/* the number of remaining to be filled */
size_remain = size - LCD_CLEAR_SEND_NUMBER;
size = LCD_CLEAR_SEND_NUMBER;
}
lcd_address_set(x_start, y_start, x_end, y_end);
for (i = y_start; i <= y_end; i++)
{
for (j = x_start; j <= x_end; j++)lcd_write_half_word(color);
}
}
/**
* display a line on the lcd.
*
* @param x1 x1 position
* @param y1 y1 position
* @param x2 x2 position
* @param y2 y2 position
*
* @return void
*/
void lcd_draw_line(u16 x1, u16 y1, u16 x2, u16 y2)
{
u16 t;
u32 i = 0;
int xerr = 0, yerr = 0, delta_x, delta_y, distance;
int incx, incy, row, col;
if (y1 == y2)
{
/* fast draw transverse line */
lcd_address_set(x1, y1, x2, y2);
u8 line_buf[480] = {0};
for (i = 0; i < x2 - x1; i++)
{
line_buf[2 * i] = FORE_COLOR >> 8;
line_buf[2 * i + 1] = FORE_COLOR;
}
for(i=0;i<(x2-x1)*2;i++)
{
*(__IO u8*)LCD_DATA=line_buf[i];
}
return ;
}
delta_x = x2 - x1;
delta_y = y2 - y1;
row = x1;
col = y1;
if (delta_x > 0)incx = 1;
else if (delta_x == 0)incx = 0;
else
{
incx = -1;
delta_x = -delta_x;
}
if (delta_y > 0)incy = 1;
else if (delta_y == 0)incy = 0;
else
{
incy = -1;
delta_y = -delta_y;
}
if (delta_x > delta_y)distance = delta_x;
else distance = delta_y;
for (t = 0; t <= distance + 1; t++)
{
lcd_draw_point(row, col);
xerr += delta_x ;
yerr += delta_y ;
if (xerr > distance)
{
xerr -= distance;
row += incx;
}
if (yerr > distance)
{
yerr -= distance;
col += incy;
}
}
}
/**
* display a rectangle on the lcd.
*
* @param x1 x1 position
* @param y1 y1 position
* @param x2 x2 position
* @param y2 y2 position
*
* @return void
*/
void lcd_draw_rectangle(u16 x1, u16 y1, u16 x2, u16 y2)
{
lcd_draw_line(x1, y1, x2, y1);
lcd_draw_line(x1, y1, x1, y2);
lcd_draw_line(x1, y2, x2, y2);
lcd_draw_line(x2, y1, x2, y2);
}
/**
* display a circle on the lcd.
*
* @param x x position of Center
* @param y y position of Center
* @param r radius
*
* @return void
*/
void lcd_draw_circle(u16 x0, u16 y0, u8 r)
{
int a, b;
int di;
a = 0;
b = r;
di = 3 - (r << 1);
while (a <= b)
{
lcd_draw_point(x0 - b, y0 - a);
lcd_draw_point(x0 + b, y0 - a);
lcd_draw_point(x0 - a, y0 + b);
lcd_draw_point(x0 - b, y0 - a);
lcd_draw_point(x0 - a, y0 - b);
lcd_draw_point(x0 + b, y0 + a);
lcd_draw_point(x0 + a, y0 - b);
lcd_draw_point(x0 + a, y0 + b);
lcd_draw_point(x0 - b, y0 + a);
a++;
//Bresenham
if (di < 0)di += 4 * a + 6;
else
{
di += 10 + 4 * (a - b);
b--;
}
lcd_draw_point(x0 + a, y0 + b);
}
}
void lcd_show_char(u16 x, u16 y, u8 data, u32 size)
{
u8 temp;
u8 num = 0;;
u8 pos, t;
u16 colortemp = FORE_COLOR;
if (x > LCD_W - size / 2 || y > LCD_H - size)return;
data = data - ' ';
#ifdef ASC2_1608
if (size == 16)
{
lcd_address_set(x, y, x + size / 2 - 1, y + size - 1);//(x,y,x+8-1,y+16-1)
/* fast show char */
for (pos = 0; pos < size * (size / 2) / 8; pos++)
{
temp = asc2_1608[(u16)data * size * (size / 2) / 8 + pos];
for (t = 0; t < 8; t++)
{
if (temp & 0x80)colortemp = FORE_COLOR;
else colortemp = BACK_COLOR;
lcd_write_half_word(colortemp);
temp <<= 1;
}
}
}
else
#endif
#ifdef ASC2_2412
if (size == 24)
{
lcd_address_set(x, y, x + size / 2 - 1, y + size - 1);
/* fast show char */
for (pos = 0; pos < (size * 16) / 8; pos++)
{
temp = asc2_2412[(u16)data * (size * 16) / 8 + pos];
if (pos % 2 == 0)
{
num = 8;
}
else
{
num = 4;
}
for (t = 0; t < num; t++)
{
if (temp & 0x80)colortemp = FORE_COLOR;
else colortemp = BACK_COLOR;
lcd_write_half_word(colortemp);
temp <<= 1;
}
}
}
else
#endif
#ifdef ASC2_3216
if (size == 32)
{
lcd_address_set(x, y, x + size / 2 - 1, y + size - 1);
/* fast show char */
for (pos = 0; pos < size * (size / 2) / 8; pos++)
{
temp = asc2_3216[(u16)data * size * (size / 2) / 8 + pos];
for (t = 0; t < 8; t++)
{
if (temp & 0x80)colortemp = FORE_COLOR;
else colortemp = BACK_COLOR;
lcd_write_half_word(colortemp);
temp <<= 1;
}
}
}
else
#endif
{
printf("There is no any define ASC2_1208 && ASC2_2412 && ASC2_2416 && ASC2_3216 !");
}
}
/**
* display the number on the lcd.
*
* @param x x position
* @param y y position
* @param num number
* @param len length of number
* @param size size of font
*
* @return void
*/
void lcd_show_num(u16 x, u16 y, u32 num, u8 len, u32 size)
{
lcd_show_string(x, y, size, "%d", num);
}
/**
* display the string on the lcd.
*
* @param x x position
* @param y y position
* @param size size of font
* @param p the string to be display
*
* @return 0: display success
* -1: size of font is not support
*/
void lcd_show_string(u16 x, u16 y, u32 size, const char *fmt, ...)
{
#define LCD_STRING_BUF_LEN 128
va_list args;
u8 buf[LCD_STRING_BUF_LEN] = {0};
u8 *p = NULL;
if (size != 16 && size != 24 && size != 32)
{
printf("font size(%d) is not support!", size);
}
va_start(args, fmt);
vsnprintf((char *)buf, 100, (const char *)fmt, args);
va_end(args);
p = buf;
while (*p != '\0')
{
if (x > LCD_W - size / 2)
{
x = 0;
y += size;
}
if (y > LCD_H - size)
{
y = x = 0;
lcd_clear(RED);
}
lcd_show_char(x, y, *p, size);
x += size / 2;
p++;
}
}
/**
* display the image on the lcd.
*
* @param x x position
* @param y y position
* @param length length of image
* @param wide wide of image
* @param p image
*
* @return 0: display success
* -1: the image is too large
*/
void lcd_show_image(u16 x, u16 y, u16 length, u16 wide, const u8 *p)
{
u16 i=0;
// RT_ASSERT(p);
if (x + length > LCD_W || y + wide > LCD_H)
{
printf("Error");
}
lcd_address_set(x, y, x + length - 1, y + wide - 1);
for(i=0;i<length * wide * 2;i++)
{
*(__IO u8*)LCD_DATA=p[i];
}
}
这个就是LCD屏幕相关的函数库,其底层逻辑就是往里面写入时分CMD和DATA两种模式,CMD就是给控制指令,DATA就是给数据。
引脚分配
| 端口功能 | 引脚功能 | 功能 | 备注 |
|---|
| 液晶屏LCD | PD14 | FSMC_D0 | 液晶 LCD 数据口D0 |
| PD15 | FSMC_D1 | 液晶 LCD 数据口D0 |
| PD0 | FSMC_D2 | 液晶 LCD 数据口D0 |
| PD1 | FSMC_D3 | 液晶 LCD 数据口D0 |
| PE7 | FSMC_D4 | 液晶 LCD 数据口D0 |
| PE8 | FSMC_D5 | 液晶 LCD 数据口D0 |
| PE9 | FSMC_D6 | 液晶 LCD 数据口D0 |
| PE10 | FSMC_D7 | 液晶 LCD 数据口D0 |
| PD4 | FSMC_NOE | 液晶 LCD_RD |
| PD5 | FSMC_NWE | 液晶 LCD_WR |
| PD7 | FSMC_NE1 | 液晶 LCD_CS |
| PD12 | FSMC_A17 | 液晶 LCD_DC |
| RST | 复位 | 液晶 LCD_RESET |
| PB14 | LCD_BL | 液晶背光开关,高电平有效 |
| PC4 | LCD_TE | E 液晶 Tearing Effect 输出(帧同步) |
本次例程中仅使用下面这两个函数:
void lcd_set_color(u16 back, u16 fore)
{
BACK_COLOR = back;
FORE_COLOR = fore;
}
void lcd_show_string(u16 x, u16 y, u32 size, const char *fmt, ...)
{
#define LCD_STRING_BUF_LEN 128
va_list args;
u8 buf[LCD_STRING_BUF_LEN] = {0};
u8 *p = NULL;
if (size != 16 && size != 24 && size != 32)
{
printf("font size(%d) is not support!", size);
}
va_start(args, fmt);
vsnprintf((char *)buf, 100, (const char *)fmt, args);
va_end(args);
p = buf;
while (*p != '\0')
{
if (x > LCD_W - size / 2)
{
x = 0;
y += size;
}
if (y > LCD_H - size)
{
y = x = 0;
lcd_clear(RED);
}
lcd_show_char(x, y, *p, size);
x += size / 2;
p++;
}
}
第一个函数是设置颜色,其中第一个数据是背景色,第二个数据是字体颜色。
第二个函数是显示字符串,前两个数据分别是X轴位置和y轴位置,第三个数据是字体大小,后面的是内容可变参数输出。
X轴与Y轴坐标轴
2.蓝牙读取和写入
#define RXBUF_SIZE 1024 // DMA buffer size
#define size(a) (sizeof(a) / sizeof(*(a)))
/* Global Variable */
u8 TxBuffer[] = " ";
u8 RxBuffer[RXBUF_SIZE]={0};
/*******************************************************************************
* Function Name : USARTx_CFG
* Description : Initializes the USART peripheral.
* 描述 : 串口初始化
* Input : None
* Return : None
*******************************************************************************/
void USARTx_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART7, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* USART7 TX-->C2 RX-->C3 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //RX,输入上拉
GPIO_Init(GPIOC, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200; // 波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 数据位 8
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位 1
USART_InitStructure.USART_Parity = USART_Parity_No; // 无校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //使能 RX 和 TX
USART_Init(UART7, &USART_InitStructure);
DMA_Cmd(DMA2_Channel9, ENABLE); //开启接收 DMA
USART_Cmd(UART7, ENABLE); //开启UART
}
/*******************************************************************************
* Function Name : DMA_INIT
* Description : Configures the DMA.
* 描述 : DMA 初始化
* Input : None
* Return : None
*******************************************************************************/
void DMA_INIT(void)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA2, ENABLE);
// TX DMA 初始化
DMA_DeInit(DMA2_Channel8);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)(&UART7->DATAR); // DMA 外设基址,需指向对应的外设
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)TxBuffer; // DMA 内存基址,指向发送缓冲区的首地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; // 方向 : 外设 作为 终点,即 内存 -> 外设
DMA_InitStructure.DMA_BufferSize = 0; // 缓冲区大小,即要DMA发送的数据长度,目前没有数据可发
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 外设地址自增,禁用
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; // 内存地址自增,启用
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; // 外设数据位宽,8位(Byte)
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; // 内存数据位宽,8位(Byte)
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; // 普通模式,发完结束,不循环发送
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh; // 优先级最高
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; // M2P,禁用M2M
DMA_Init(DMA2_Channel8, &DMA_InitStructure);
// RX DMA 初始化,环形缓冲区自动接收
DMA_DeInit(DMA2_Channel9);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)(&UART7->DATAR);
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)RxBuffer; // 接收缓冲区
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; // 方向 : 外设 作为 源,即 内存 <- 外设
DMA_InitStructure.DMA_BufferSize = RXBUF_SIZE; // 缓冲区长度为 RXBUF_SIZE
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; // 循环模式,构成环形缓冲区
DMA_Init(DMA2_Channel9, &DMA_InitStructure);
}
/*******************************************************************************
* Function Name : GPIO_CFG
* Description : Initializes GPIOs.
* 描述 : GPIO 初始化
* Input : None
* Return : None
*******************************************************************************/
void GPIO_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// CH9141 配置引脚初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* BLE_sleep --> C13 BLE_AT-->A7 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/*******************************************************************************
* Function Name : uartWriteBLE
* Description : send data to BLE via UART7 向蓝牙模组发送数据
* Input : char * data data to send 要发送的数据的首地址
* uint16_t num number of data 数据长度
* Return : RESET UART7 busy,failed to send 发送失败
* SET send success 发送成功
*******************************************************************************/
FlagStatus uartWriteBLE(char * data , uint16_t num)
{
//如上次发送未完成,返回
if(DMA_GetCurrDataCounter(DMA2_Channel8) != 0){
return RESET;
}
DMA_ClearFlag(DMA2_FLAG_TC8);
DMA_Cmd(DMA2_Channel8, DISABLE ); // 关 DMA 后操作
DMA2_Channel8->MADDR = (uint32_t)data; // 发送缓冲区为 data
DMA_SetCurrDataCounter(DMA2_Channel8,num); // 设置缓冲区长度
DMA_Cmd(DMA2_Channel8, ENABLE); // 开 DMA
return SET;
}
/*******************************************************************************
* Function Name : uartWriteBLEstr
* Description : send string to BLE via UART7 向蓝牙模组发送字符串
* Input : char * str string to send
* Return : RESET UART7 busy,failed to send 发送失败
* SET send success 发送成功
*******************************************************************************/
FlagStatus uartWriteBLEstr(char * str)
{
uint16_t num = 0;
while(str[num])num++; // 计算字符串长度
return uartWriteBLE(str,num);
}
/*******************************************************************************
* Function Name : uartReadBLE
* Description : read some bytes from receive buffer 从接收缓冲区读出一组数据
* Input : char * buffer buffer to storage the data 用来存放读出数据的地址
* uint16_t num number of data to read 要读的字节数
* Return : int number of bytes read 返回实际读出的字节数
*******************************************************************************/
uint16_t rxBufferReadPos = 0; //接收缓冲区读指针
uint32_t uartReadBLE(char * buffer , uint16_t num)
{
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9); //计算 DMA 数据尾的位置
uint16_t i = 0;
if (rxBufferReadPos == rxBufferEnd){
// 无数据,返回
return 0;
}
while (rxBufferReadPos!=rxBufferEnd && i < num){
buffer[i] = RxBuffer[rxBufferReadPos];
i++;
rxBufferReadPos++;
if(rxBufferReadPos >= RXBUF_SIZE){
// 超出缓冲区,回零
rxBufferReadPos = 0;
}
}
return i;
}
/*******************************************************************************
* Function Name : uartReadByteBLE
* Description : read one byte from UART buffer 从接收缓冲区读出 1 字节数据
* Input : None
* Return : char read data 返回读出的数据(无数据也返回0)
*******************************************************************************/
char uartReadByteBLE()
{
char ret;
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9);//计算 DMA 数据尾的位置
if (rxBufferReadPos == rxBufferEnd){
// 无数据,返回
return 0;
}
ret = RxBuffer[rxBufferReadPos];
rxBufferReadPos++;
if(rxBufferReadPos >= RXBUF_SIZE){
// 超出缓冲区,回零
rxBufferReadPos = 0;
}
return ret;
}
/*******************************************************************************
* Function Name : uartAvailableBLE
* Description : get number of bytes Available to read from the UART buffer 获取缓冲区中可读数据的数量
* Input : None
* Return : uint16_t number of bytes Available to readd 返回可读数据数量
*******************************************************************************/
uint16_t uartAvailableBLE()
{
uint16_t rxBufferEnd = RXBUF_SIZE - DMA_GetCurrDataCounter(DMA2_Channel9);//计算 DMA 数据尾的位置
// 计算可读字节
if (rxBufferReadPos <= rxBufferEnd){
return rxBufferEnd - rxBufferReadPos;
}else{
return rxBufferEnd +RXBUF_SIZE -rxBufferReadPos;
}
}
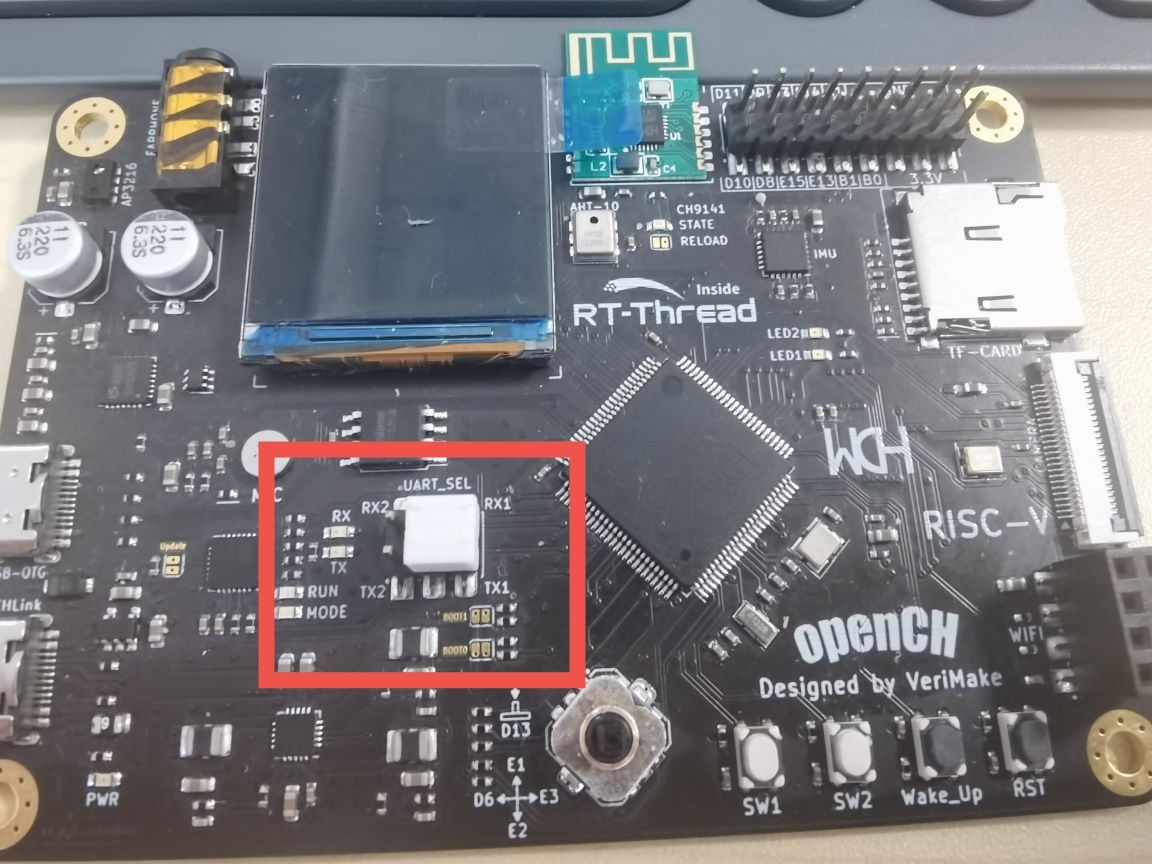
本次使用的蓝牙读取和写入的部分采用DMA搬运数据,使用的串口输出为UART1(库里面自带输出函数printf),注意跳线帽应保证与RX1和TX1相连,这样WCHLink串口才能接收到数据。
| 端口功能 | 引脚功能 | 功能 | 备注 |
|---|
| 串口1 | PA2 | UART1_TX | 复用:DVP_D0 |
| PA3 | UART1_RX | 复用:DVP_D1 |
| 蓝牙 CH9141 | PC2 | UART7_TX | CH9141_RX |
| PC3 | UART7_RX | CH9141_TX |
| PA7 | BLE_AT | BLE控制管脚 0为AT模式,1为透传模式 |
| PC13 | BLE_SLEEP | 低电平有效,低功耗模式 |
3.main函数
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d\r\n",SystemCoreClock);
DMA_INIT();
USARTx_CFG(); /* USART INIT */
USART_DMACmd(UART7,USART_DMAReq_Tx|USART_DMAReq_Rx,ENABLE);
lcd_init();
lcd_set_color(BLACK,WHITE);
lcd_show_string(50, 0, 32,"Yuimerlin");
lcd_set_color(BLACK,RED);
lcd_show_string(0, 32, 16,"BLE Device Test");
delay_ms(100);
GPIO_CFG();
// GPIO_WriteBit(GPIOA, GPIO_Pin_7,RESET); //进入 AT
GPIO_WriteBit(GPIOC, GPIO_Pin_13,SET); //enable CH9141
Delay_Ms(1000);
while(1){
Delay_Ms(400);
int num = uartAvailableBLE(); //读取蓝牙字符串
if (num > 0 ){
char buffer[1024]={"\0"};
uartReadBLE(buffer , num);
lcd_set_color(BLACK,GREEN); //将读取的字符串显示在屏幕上
lcd_show_string(30, 208, 16,"Receive : %8s", buffer);
printf("Revceived:%s\r\n",buffer); //将收到的字符串发送给串口
}
// GPIO_WriteBit(GPIOA, GPIO_Pin_7,SET); // 退出AT。可用手机或电脑连接CH9141,测试数据收发
}
}
程序流程:
- 初始化各模块,屏幕上显示这次例程的作者和主题;
- 关闭蓝牙模块的低功耗模式,并读取蓝牙发送的数据;
- 将读取的数据显示与LCD屏幕,并将其发送给WCHLink串口。

首先在BLE虚拟串口管理器启动之前设定好的串口。
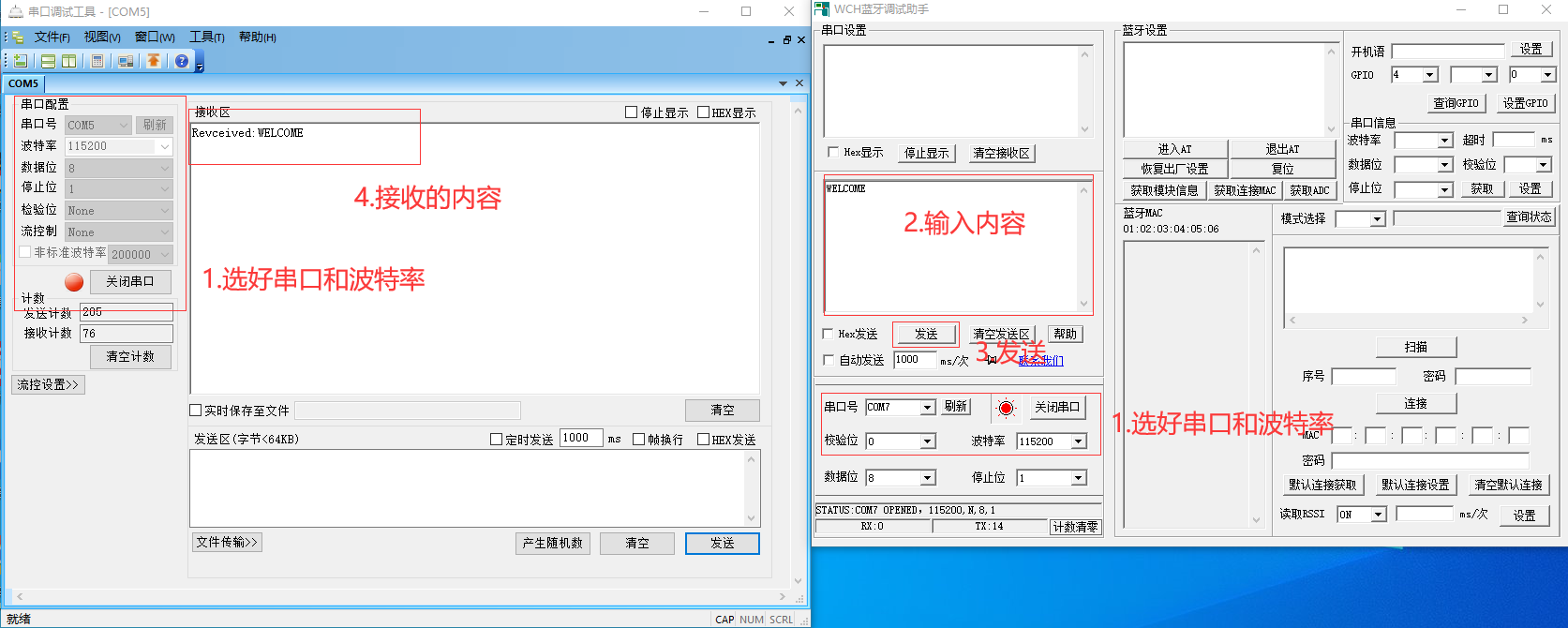
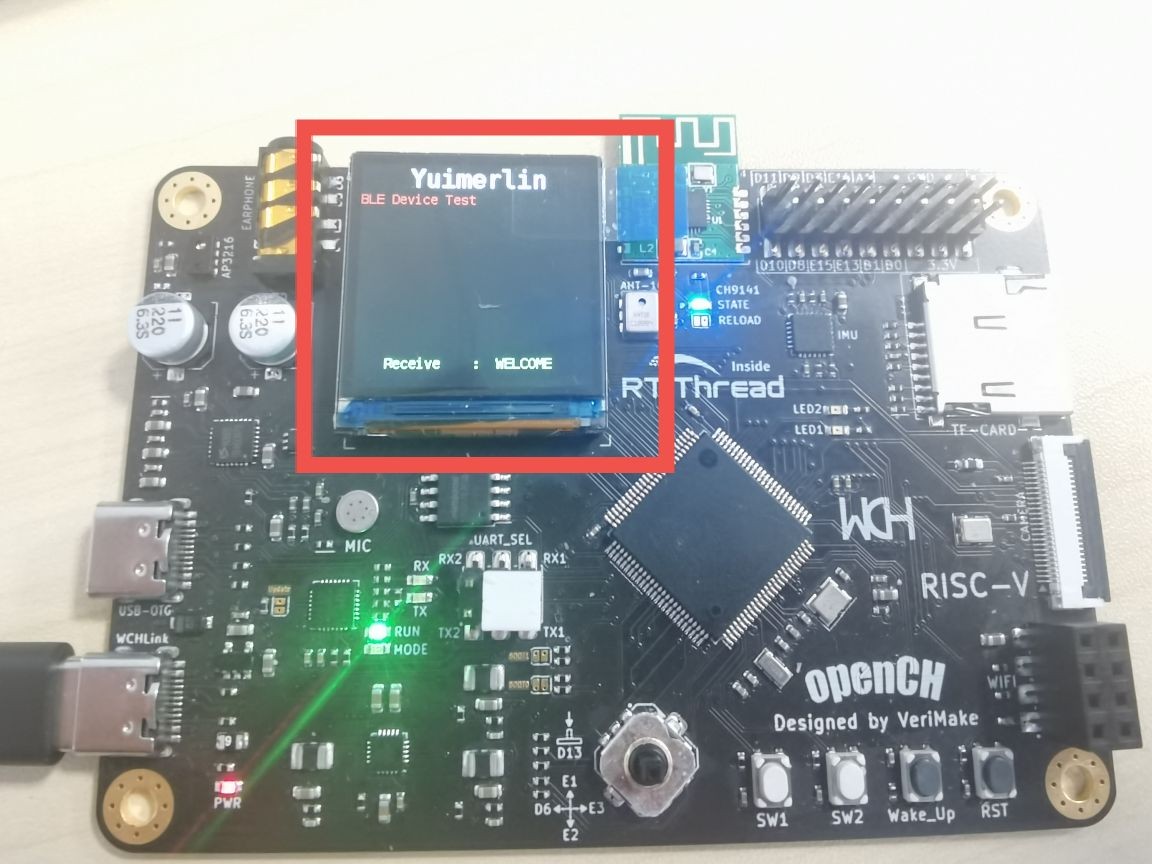
选好对应的串口和波特率,波特率设定为115200,将输入的内容发送出去,可以看到串口5(WCHLink)收到了发出的内容。也可以看到LCD屏幕上有了显示。成功完成了电脑对赤菟板的通信。
后话
这篇教程仅为CH32V307的蓝牙教程的上篇,为了防止混乱,这次仅演示电脑与板子连接的例程,手机端连接好了直接在对话模式下发送数据。我会尽快更新续篇的。
这次的程序和之前一样放到了gitee仓库上,文件名为:LCD_BLE
欢迎大家参考!
 网站备案号:ICP备16046599号-1
网站备案号:ICP备16046599号-1